高精度地图(HD Map)
要了解智驾中“无图”的概念首先我们看看有图是怎么样的?
导航地图一般可分为标准地图(SD Map)、车道级地图(LD Map)、高精地图(HD Map)。
对于自动驾驶系统,一般所谓的有图指的是高精地图。而所谓的高精度地图(HD map)是相对于常用的普通电子导航地图而言的,具有高精度、需要实时更新等特点。 高精度地图包括大量的驾驶辅助信息,最重要的信息是道路网的精确三维表征。 不仅有高精度的坐标,同时还有准确的车道形状,并且每个车道的坡度、曲率、航向、高程、侧倾等数据也都含有。
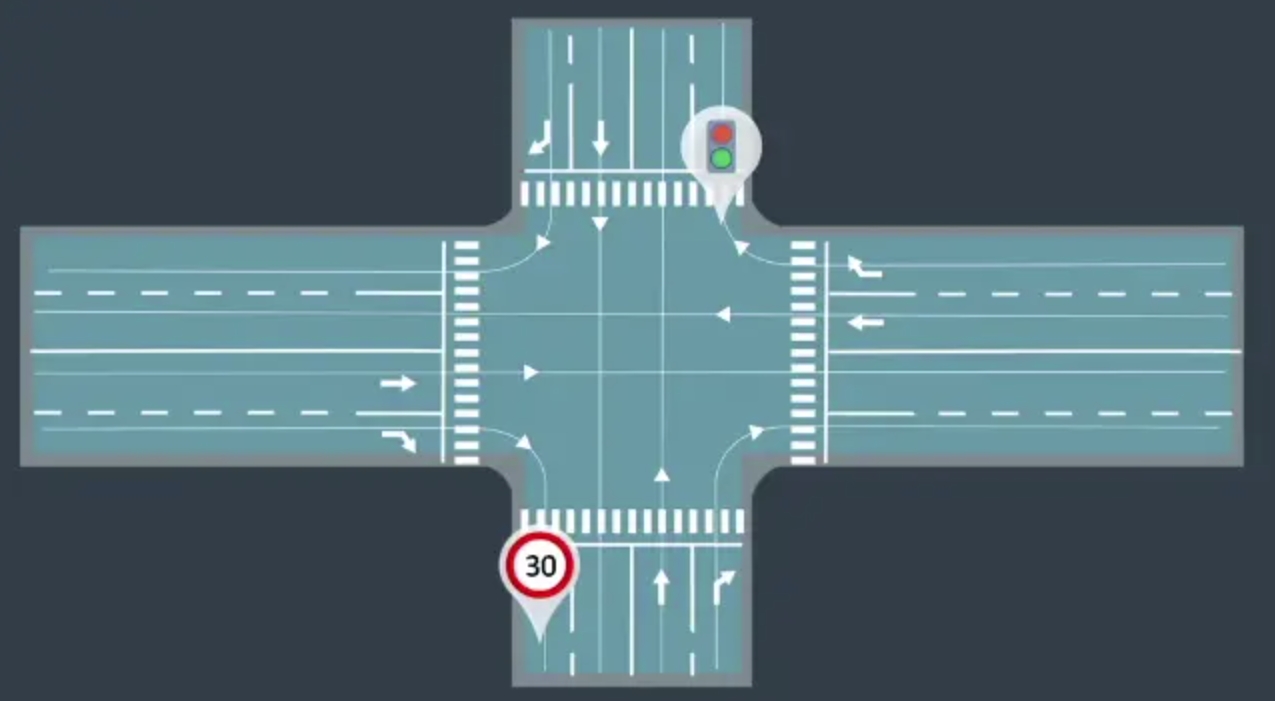
如交叉路口布局和路标位置
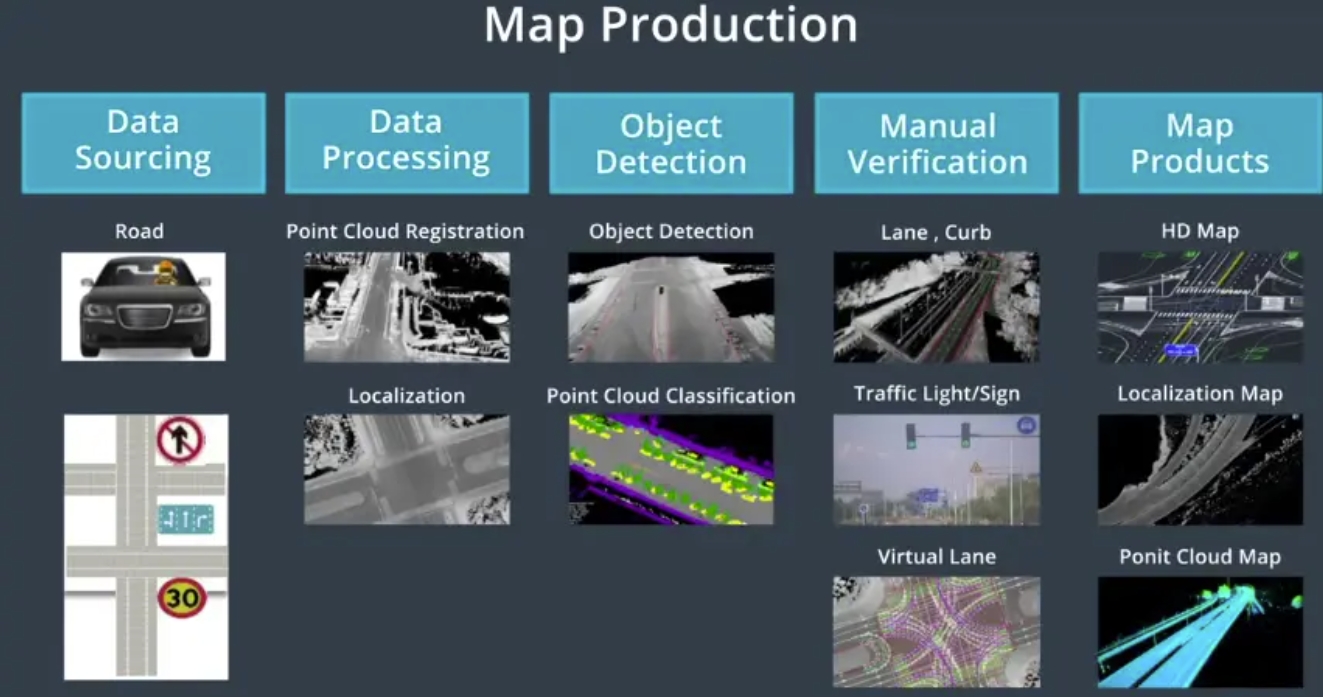
通常的高精地图制作流程
因此“轻地图,重感知”的概念应运而生,开发全场景的自动驾驶系统,不再依赖高精地图是关键。但是没有了高精地图,自然而然的给自动驾驶系统带来了更大的挑战,比如自动驾驶可能不知道车辆在哪条车道上,更不知道众多信号灯中,哪一个信号灯和车道线匹配。因此需要车辆具备识别和理解车道线和道路语义信息的能力。 可以理解为有高精地图就可以开启“上帝视角”,但是很耗资源,而没有高精地图就需要车辆具备“自我感知”的能力。
对于自动驾驶系统,一般所谓的有图指的是高精地图。而所谓的高精度地图(HD map)是相对于常用的普通电子导航地图而言的,具有高精度、需要实时更新等特点。 高精度地图包括大量的驾驶辅助信息,最重要的信息是道路网的精确三维表征。 不仅有高精度的坐标,同时还有准确的车道形状,并且每个车道的坡度、曲率、航向、高程、侧倾等数据也都含有。
因此“轻地图,重感知”的概念应运而生,开发全场景的自动驾驶系统,不再依赖高精地图是关键。但是没有了高精地图,自然而然的给自动驾驶系统带来了更大的挑战,比如自动驾驶可能不知道车辆在哪条车道上,更不知道众多信号灯中,哪一个信号灯和车道线匹配。因此需要车辆具备识别和理解车道线和道路语义信息的能力。 可以理解为有高精地图就可以开启“上帝视角”,但是很耗资源,而没有高精地图就需要车辆具备“自我感知”的能力。
“无图”
不同的车企对于“无图”的定义是不同的,但其共同点就是:不依赖高成本的高精度地图。
而模型的训练数据则是经过严格筛选的,“驾驶行为规范的”的数据(据说完成这个数据有三个条件:1、几十万颗英伟达H100级芯片训练集;2、几亿英里的真实自动驾驶Bev视频数据(特斯拉在北美的保险业务衍生出驾驶员行为监测系统);3每年超过20亿美元的训练成本)。
除了“无图”方案外,小鹏还具有另外一种模式“AI”代驾,只需要学习一次即可启动城市NOA。“AI”代驾更多的是一种众包图和无图之间的模式,其学习过程中只会记忆导航点和转弯信息,实际运行过程中离不开“无图”能力,学习只是为了的提升体验和安全等。 主要是学习个性化的行车策略,并不是完全为了建图。从城区遇到的问题可以预见,面对高频变化的城区freespace的通行道路,智驾系统需要具备强大的实时感知和决策能力才行。真无图,还不听导航的?小鹏XNGP辅助驾驶 勇闯北京二环
华为无图城区智驾,年底全国可用!什么水平?
广汽科技日回顾丨深度解读无图纯视觉智能驾驶技术
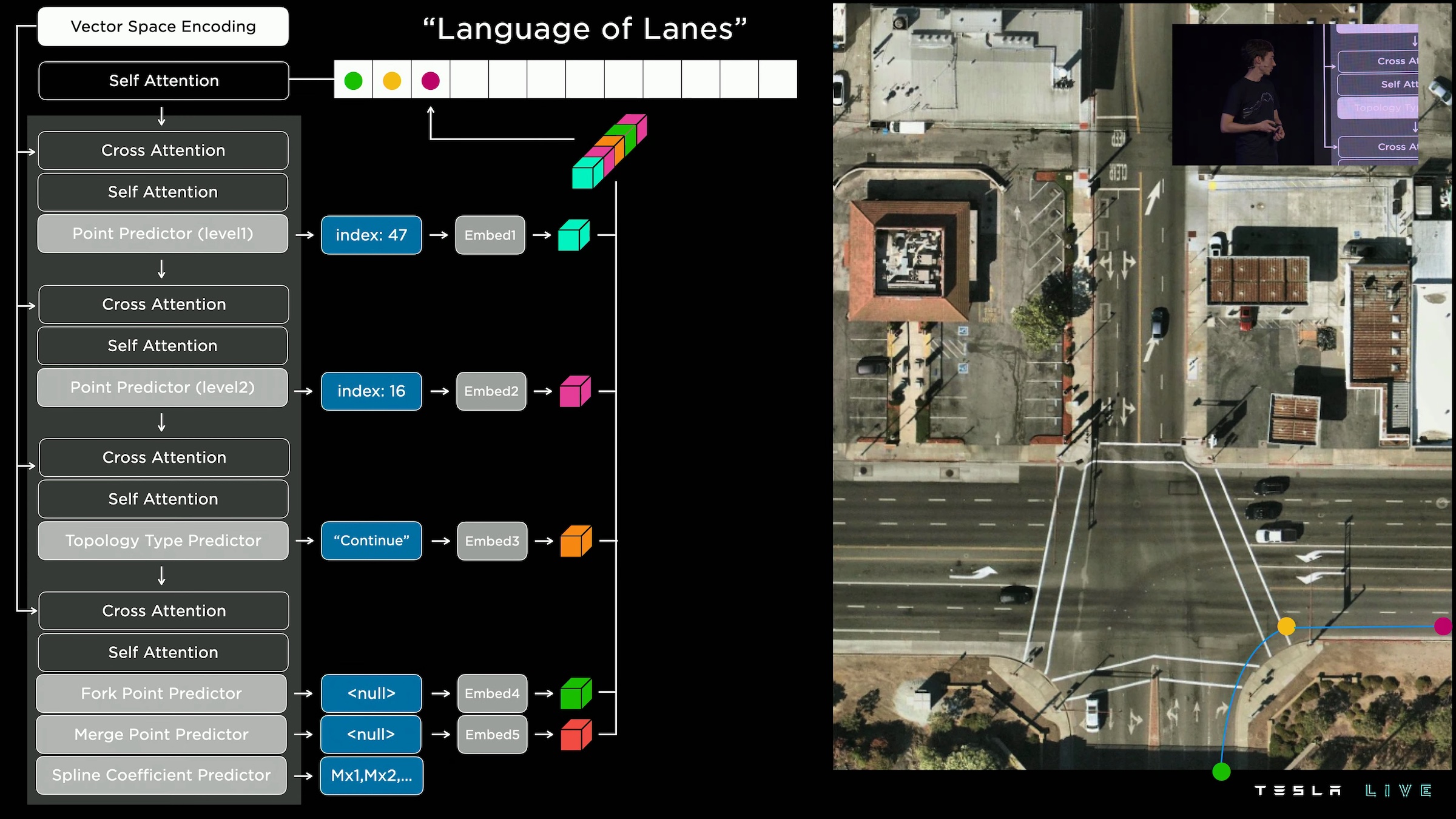
特斯拉的FSD Lanes Neural Network方案
仅使用SD地图中的道路的几何&拓扑关系,车道等级、数量、宽度、属性信息和Occupancy特征就能够构建出实时的车道级拓扑结构,从而结束了车道级拓扑结构只能从高精地图中获取的难点,在技术方案和落地实现上给出了高精地图的替代方案。
而模型的训练数据则是经过严格筛选的,“驾驶行为规范的”的数据(据说完成这个数据有三个条件:1、几十万颗英伟达H100级芯片训练集;2、几亿英里的真实自动驾驶Bev视频数据(特斯拉在北美的保险业务衍生出驾驶员行为监测系统);3每年超过20亿美元的训练成本)。
小鹏的XNet
XNet更加倚重纯视觉BEV,能够实现超强的环境感知能力,小鹏实现的“无图化”就是依靠XNet来实时构建“高精地图”达成的。 小鹏的无图NGP和有图NGP是同一套技术栈,差别仅仅是把原先高精地图的输入,换成了导航地图的输入和实时感知对导航信息的理解。 为此,XNet需要感知距离的加长,提供决策规划需要的超视距的环境信息;同时通过学习大量的道路及路口特征,增强感知复杂道路结构的能力。 “无图方案”在路段行驶时基本没有问题,面临的主要还是路口的问题,可以看到在路口区域确实存在感知盲区,所以相应的决策会显得谨慎、迟疑。除了“无图”方案外,小鹏还具有另外一种模式“AI”代驾,只需要学习一次即可启动城市NOA。“AI”代驾更多的是一种众包图和无图之间的模式,其学习过程中只会记忆导航点和转弯信息,实际运行过程中离不开“无图”能力,学习只是为了的提升体验和安全等。 主要是学习个性化的行车策略,并不是完全为了建图。从城区遇到的问题可以预见,面对高频变化的城区freespace的通行道路,智驾系统需要具备强大的实时感知和决策能力才行。