本博文基于思岚的赫尔墨斯 Hermes PRO MAX移动底盘的技术文档做个基本的了解。 本博文仅供本人学习记录用~
地盘硬件部分
底盘采用的主控方案为RK3588(8核,4 * Cortex A76+4 * Cortex A55。主频2.4G),4G内存 (此前,了解过的RK3576是:8核A72+A53,2.2G主频+4G内存,两者差距不大)
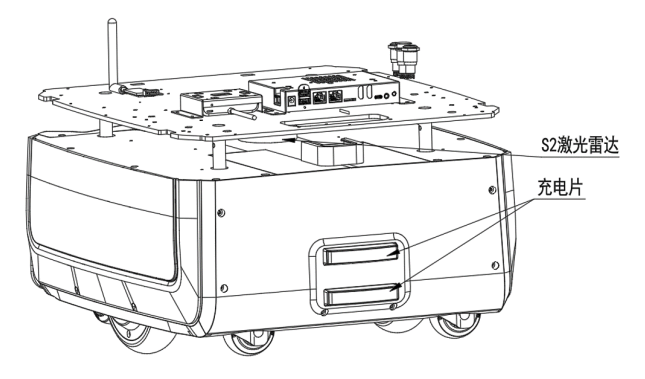
地盘的整体结构如下所示。注意地盘后侧由于有走线的遮挡,因此激光雷达有一小部分被block了(实测的时候大概30度左右~)
|
|
最大的负载为80KG,相当于一个成年人。
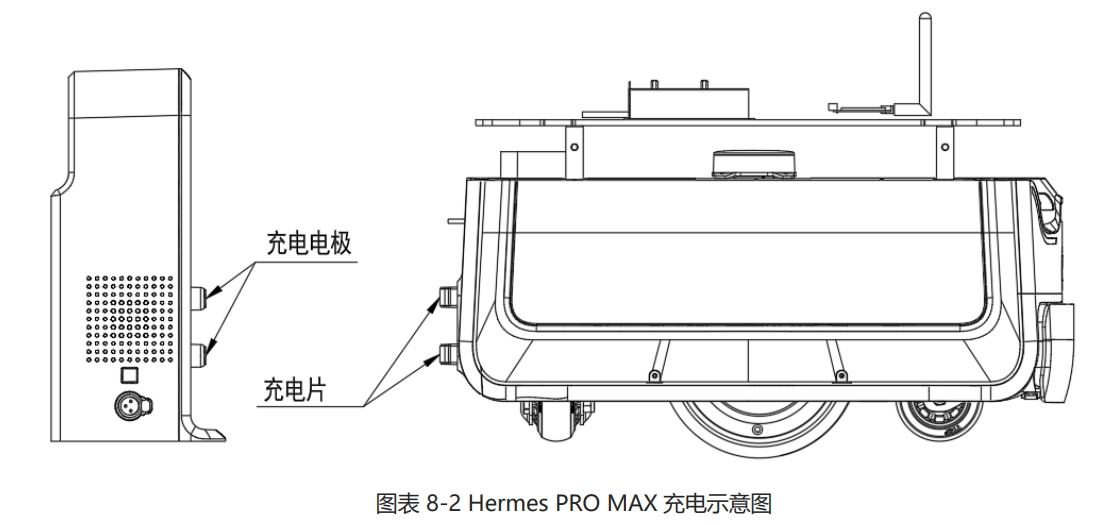
有自动回充功能,但是Hermes PRO MAX 底盘单独运行时,自动回充功能无法触发,需要开启配送或消毒插件才能使用。定制机型和搭配整机使用则有自动回充功能。
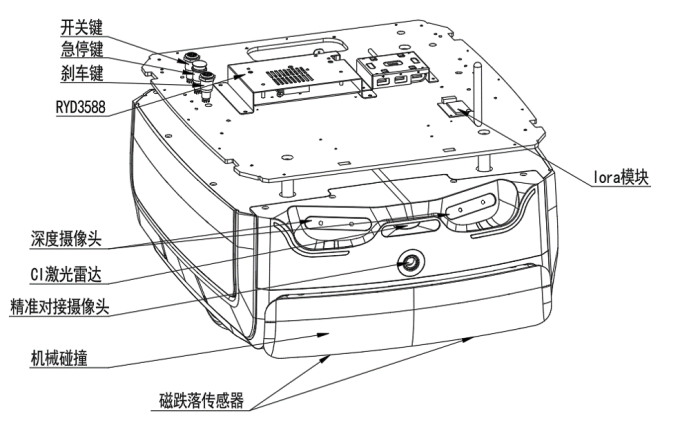
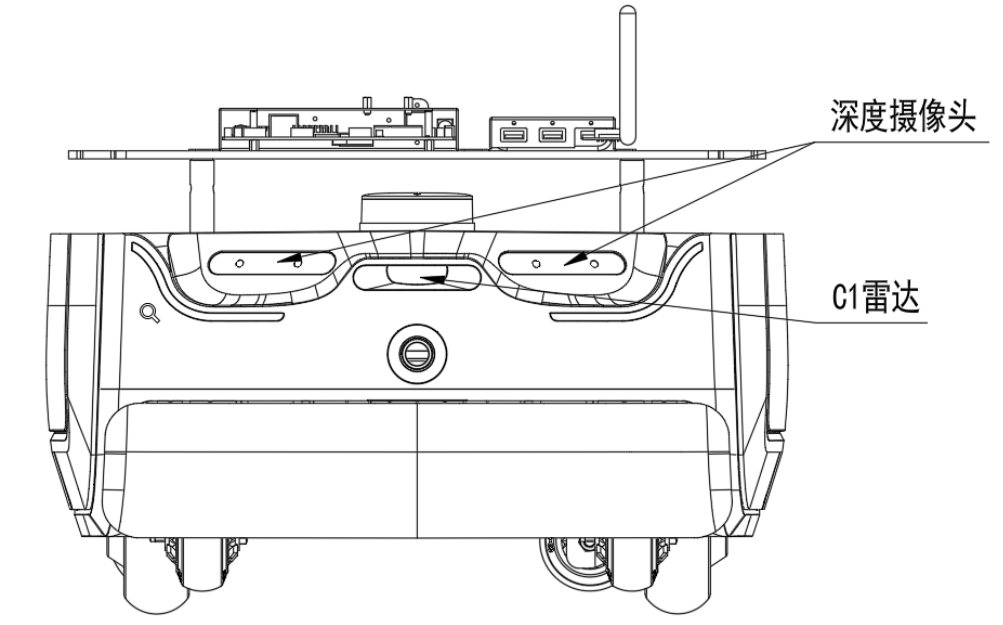
传感器方面是有两个激光雷达+两个深度相机:
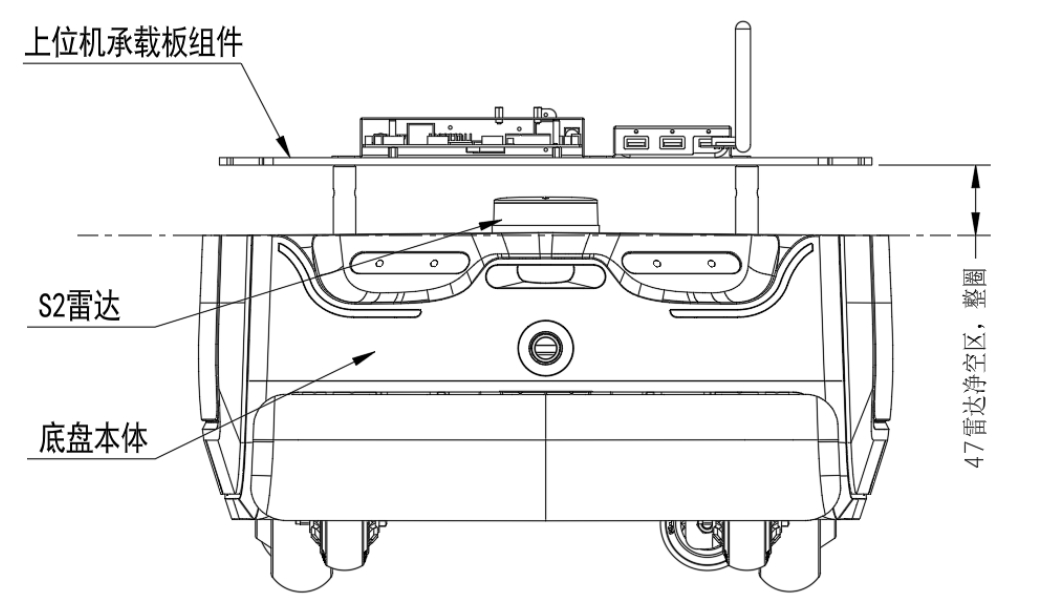
- S2 2D激光雷达(RPLIDAR S2P) 需要留一个S2 2D激光雷达的净空区:底盘本体和上位机之间有激光雷达,其需要一定的净空区以避免被遮蔽或者干扰
- 深度相机及C1雷达 深度相机为两个。C1雷达应该就是参数表中的低矮障碍物识别传感器?不过机器人本身似乎也有带碰撞条。
windows系统
对于建图定位等功能,windows下开放API可以调用(如机器人的位姿、获取当前的地图等等),但是不能直接访问到数据data的。而在说明文档中有详细的建图流程及软件下载安装说明~
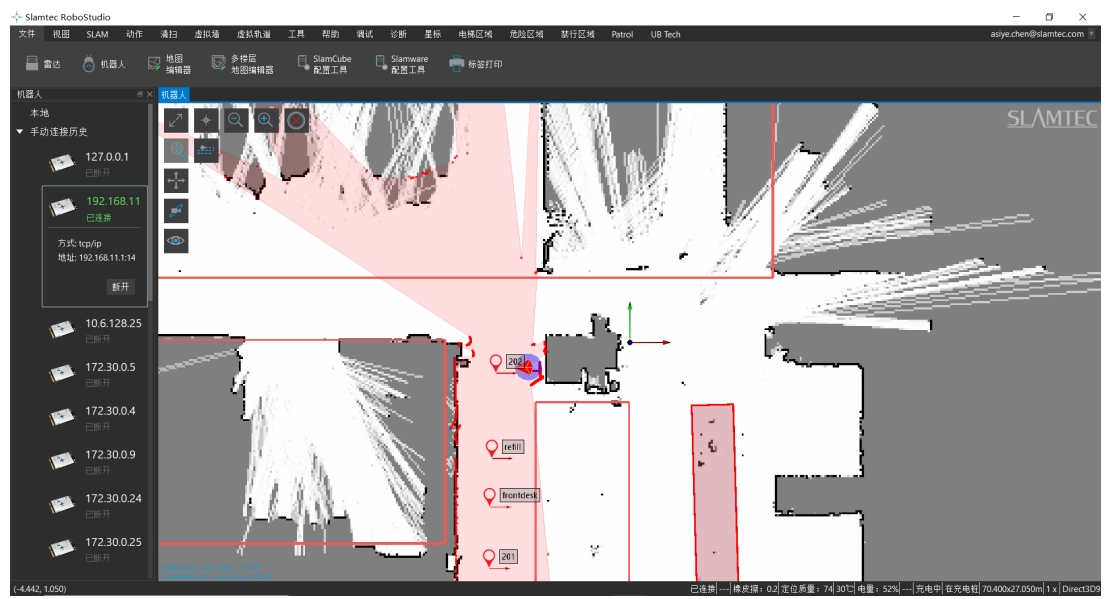
对于建图的api存在禁区和虚拟墙两个概念:
- 禁区:当人为不小心把 Hermes 推进禁区时,在 RoboStudio 中随意给一个定点,Hermes 机器能够自动从禁区中脱困出来。
- 虚拟墙:当人为不小心把 Hermes 推进虚拟墙时,在 RoboStudio 中随意给一个定点,Hermes 机器不能自动从虚拟墙中脱困出来,需要人将其推出来。
本人也曾经对思岚地板进行测试,根据测试结果总结分析如下:
- 避障部分:
- 障碍物检测:激光雷达平面的上方采用的两个倾斜向上的
深度摄像头;激光雷达平面下方应该采用的c1激光雷达作为低矮障碍物识别传感器;此外还有物理碰撞传感器,碰撞检测后,机器人会往后退一点;至于物理磁传感器应该是用于检测是否离开地面(这对于有楼梯无栏杆平台是一个很好的保护措施)
- 障碍物检测:激光雷达平面的上方采用的两个倾斜向上的
- 路径规划部分:从界面来看,路径变更的频率不高,遇到建图中没出现的障碍物会首先急停,然后重新规划轨迹。从这个角度来看,全局路径规划应该只是急停后才做,局部路径规划只规划轨迹不做臂障处理(但也存在如果开启slam地图实时更新的时候有躲避障碍物而非急停的情况)
- 对于SLAM,有建图与基于地图的纯定位模式。但是没有重定位(也就意味着开机状态应该位于起点)。而对于大场景会自动触发回环。从回环的效果来看除了scan-to-map匹配外应该还有基于临近法的回环检测。
ubuntu系统
对于ubuntu系统用户,支持ros1/ros2功能包接口,请见link
开放的topic为scan、odometry、gridmap。只能订阅这三个topic。
ros2 topic echo /slamware_ros_sdk_server_node/scanros2 topic echo /slamware_ros_sdk_server_node/odomros2 topic echo /slamware_ros_sdk_server_node/map
其余实用功能跟window版本的控制或者turtlebot3类似~
编译及开启系统
首先通过链接下载对应的ROS代码(注意是x86还是aarch架构的)。
解压后编译(基于ROS2)
cd ~/slamtec_ws
colcon build
# 编译后记得source一下
source install/setup.bash
启动节点:
# 启动SDK的launch
ros2 launch slamware_ros_sdk slamware_ros_sdk_server_node.xml ip_address:=10.160.129.38 port:=1448
# 通常可以看到底盘的SN号以及固件版本即表示启动成功了。
#开启topic订阅及发布节点
ros2 launch slamware_ros_sdk view_slamware_ros_sdk_server_node.xml
控制测试
#向前移动控制指令
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
#回桩控制指令
ros2 topic pub --once /slamware_ros_sdk_server_node/go_home slamware_ros_sdk/msg/GoHomeRequest "{}"
#前进指令
ros2 topic pub /slamware_ros_sdk_server_node/move_by_direction slamware_ros_sdk/msg/MoveByDirectionRequest "{direction: {direction: 0}}"
# 设置速度
ros2 topic pub /slamware_ros_sdk_server_node/move_by_direction slamware_ros_sdk/msg/MoveByDirectionRequest "{direction: {direction: 0}, options: {speed_ratio: {is_valid: true, value: 0.5}}}"
# 移动到点
ros2 topic pub /slamware_ros_sdk_server_node/move_to slamware_ros_sdk/msg/MoveToRequest "{location: {x: 2.0, y: 0.0, z: 0.0}, yaw: 0.0}"
http控制方式
/api/multi-floor/map/v1/stcm删除保存的地图;/api/multi-floor/map/v1/stcm/:save持久化保存当前地图;/api/multi-floor/map/v1/stcm/:reload重新加载地图;/api/multi-floor/map/v1/stcm/:sync同步地图;/api/core/slam/v1/maps/explore获取栅格地图;