引言
之前博客《Spatial Foundation Model/通用 3D 基础模型/Spatial Intelligence》对空间基础模型作了基本的论述,而此前博客视觉SLAM也对SLAM中的各种地图表达方式进行了介绍。虽然两个博客都有涉及机器人的3D 表征,但没有很系统性的,正好最近看的上交的一篇综述,打算深入阅读并记录。
本博文为学习笔记,仅供记录用~
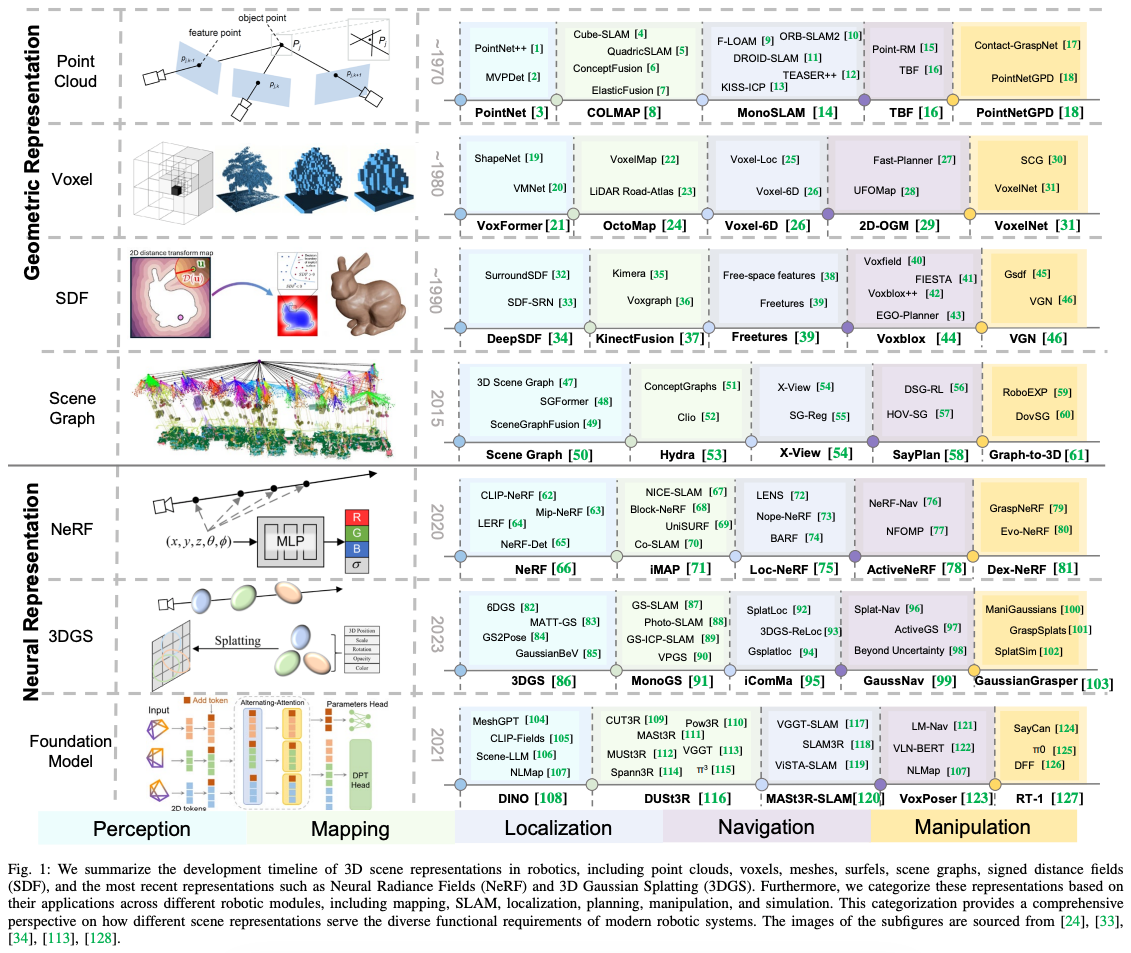
这篇综述横跨了机器人3D表征近50年的发展历程(从1970s到2025年),系统性地将表征方式划分为 几何表征(Geometric)、神经表征(Neural) 以及 基础模型表征(Foundation Model) 三大阶段,并深入探讨了它们在感知(Perception)、定位建图(Localization & Mapping)以及交互(Interaction,包括导航与操纵)中的应用。
一、 3D场景表征:机器人的“世界观”
在机器人学中,3D场景表征(Representation)是连接传感器输入与动作输出的桥梁。一个理想的表征应当具备以下属性:
- 几何精确性(Geometric Accuracy):用于避障和运动规划。
- 外观写实性(Photo-realism):用于视觉定位和高质量渲染。
- 语义丰富性(Semantic Richness):用于高级任务理解与语言交互。
- 计算高效性(Computational Efficiency):满足移动端实时运行的需求。
论文将这50年的演进通过一张宏大的时间轴展现出来:从早期的栅格地图到点云,从NeRF到3DGS,再到如今将3D世界Token化并喂给Transformer,表征的维度正在从单纯的“点位”向“高维特征”跃迁。
二、 第一阶段:几何表征(Geometric Representations)—— 经典的基石
几何表征是机器人领域研究最久、应用最成熟的方案。它直接描述物体的形状和空间的占据情况。
2.1 点云(Point Clouds)
点云是3D传感器(LiDAR, RGB-D)的直接输出。
- 数学定义:$P = {p_i \mid p_i \in \mathbb{R}^3, i=1,…,n}$,每个点包含$(x, y, z)$,有时包含颜色$(r, g, b)$或反射强度。
- 深度解读:
- 优点:离散、简单、保留了最原始的传感器几何信息。
- 缺点:缺乏拓扑结构(无法知道点与点之间是否属于同一个面),且在稀疏情况下难以进行精细的物理碰撞检测。
- 演进:从传统的ICP匹配到基于深度学习的PointNet系列。
2.2 体素与占用地图(Voxels & Occupancy Grids)
体素是2D像素在3D空间的延伸。在网格单元中显式存储密度、颜色、特征等模态信息。
- 定义:将空间量化为规则的立方体,每个格点存储占据概率 $P(o)$。
- 关键算法:
- OctoMap:通过八叉树结构解决了大规模场景下体素存储爆炸的问题。
- VoxelMap:在LiDAR SLAM中通过自适应体素提高建图精度。
- 评价:体素是避障规划的最爱,因为它能明确告诉机器人“哪里不能去”。
2.3 网格(Meshes)
Mesh由顶点(Vertices)、边(Edges)和面片(Faces)组成。
- 应用:在机器人仿真(Gazebo, Isaac Gym)和图形学渲染中是标准格式。
- 痛点:拓扑变化时的更新非常困难,在动态建图中不如点云灵活。
2.4 符号距离函数(SDF/TSDF)
SDF不再记录“有没有”,而是记录“有多远”。输出空间点到最近表面的距离,符号表示点在表面内部(负)或外部(正)。
- 数学定义:对于空间任一点 $x$,$f(x)$ 表示 $x$ 到最近表面的带符号距离。$f(x)=0$ 即代表物体表面。
- 机器人的意义:SDF非常适合轨迹优化,因为它可以提供梯度信息,引导机器人远离障碍物(梯度指向远离表面的方向)。
2.5 场景图(Scene Graphs)
这是一种更高层的抽象,将场景组织为层级结构:房屋 -> 房间 -> 物体 -> 零部件。
- 3D Dynamic Scene Graphs (DSG):代表作如 Hydra。它不仅记录了几何,还记录了物体间的语义拓扑关系。
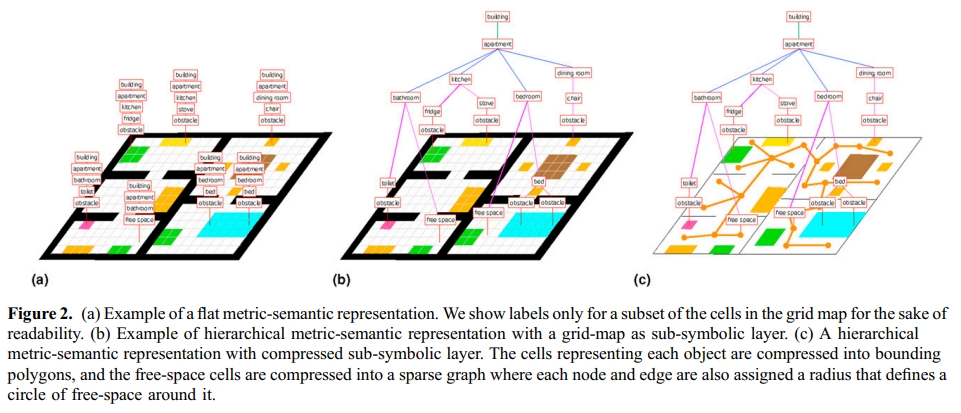
接下来补充介绍一下MIT LIDS实验室发表于IJRR 2024的工作——Hydra。 传统的机器人地图(如SLAM生成的栅格地图或点云)主要关注几何信息,能回答“这里有没有障碍物?”,但无法回答“这是什么?”。后续出现的“扁平化”语义地图虽然为点或体素添加了标签(如“墙壁”、“椅子”),但在大规模场景下面临两大挑战:
- 存储爆炸:一个办公楼层的地图可能就需要数百MB,城市级地图的存储成本难以想象。
- 推理低效:在海量、无结构的语义标签中进行查询和规划,速度非常缓慢。
研究团队指出,解决这些问题的关键在于层次化(Hierarchy)。就像人脑的认知方式一样,机器人也需要一个从具体到抽象的多层级环境模型。这种模型不仅要存储高效,还需支持快速的语义推理与任务规划。
Hydra的核心贡献是能够实时构建并维护一个分层的3D场景图。这个图结构如同一个金字塔,从底层的详细几何到顶层的抽象概念,信息逐级浓缩。如下图所示:
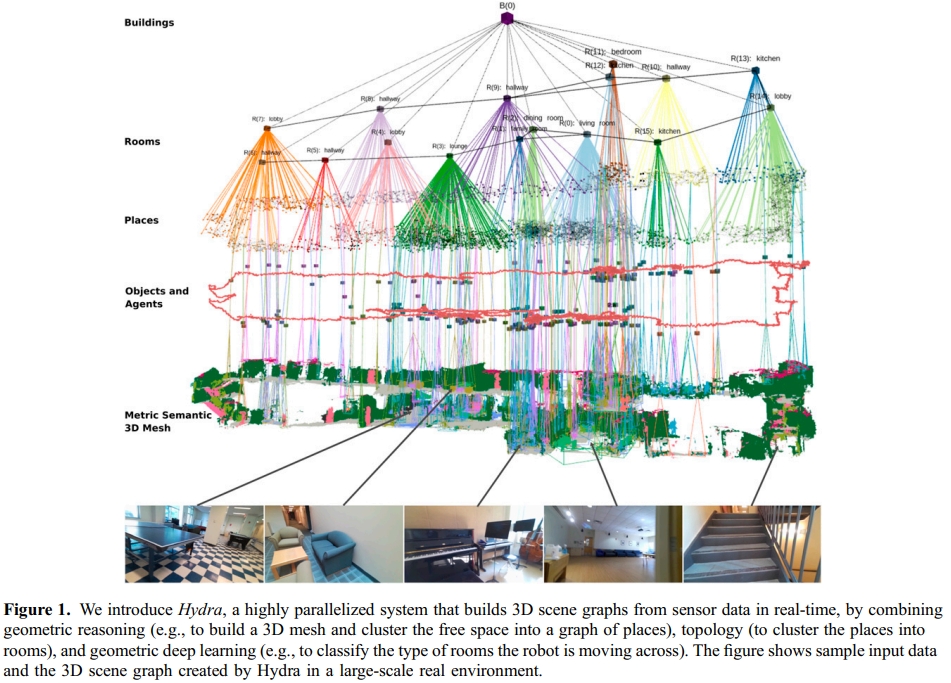
Hydra的场景图主要包含以下五个层次:
- 第1层:度量-语义网格(Metric-Semantic Mesh):最底层,是由带语义标签的3D三角网格构成的场景基础几何。
- 第2层:物体与智能体(Objects and Agents):从网格中实例分割出的独立物体(如椅子、桌子)以及机器人自身。
- 第3层:场所(Places):对环境中的“自由空间”进行拓扑建模。它是一个稀疏图,节点代表“可活动区域”,边代表区域间的连通性,是实现高效路径规划的关键。
- 第4层:房间(Rooms):将“场所”节点聚类为具有语义意义的房间(如厨房、卧室)。
- 第5层:建筑(Buildings):最高层,将所有房间组织成一个完整的建筑单元。
Hydra的突出优势在于其实时、增量式的构建与维护能力:
- 增量式前端构建:随着机器人移动,系统实时地、自底向上地逐层更新场景图。
- 长期持久化与后端优化:系统后端负责处理长时运行中的累积误差(如里程计漂移),并对场景图进行全局优化与修正。
除了上述这种传统的sense graph也有基于VLM的开放词汇地图,如
- OpenGraph:利用VLM作为认知前端,从视觉图像中分割实例并且生成语言文本(captions)。LLM基于这些captions再进行推理;接下来将2D图像特征投影到3D雷达上。
2.6 点图与动态点图
动态点图(Dynamic Point Maps, DPMs),它扩展了点图的概念,使其能够同时表示场景的3D形状和运动。
一个DPM可以表示为 $P_{i}(t_{j}, \pi_{k})$,它是一个点云图像。这个公式的含义是:
- $i$: 表示这个点云是与输入图像 $I_{i}$ 的像素对应的。
- $t_{j}$: 表示点云中3D点的位置是在时间戳$t_{j}$时刻的。
- $\pi_{k}$: 表示3D点的坐标是在相机$\pi_{k}$的坐标系下表达的。
DPM的强大之处在于,它将3D点与特定的视角(viewpoint)和时间(time) 解耦。例如,通过比较 $P_{0}(t_{0}, \pi_{0})(u)$ 和 $P_{1}(t_{0}, \pi_{0})(v)$是否相等,我们可以在同一个坐标系($\pi_{0}$)和同一个时刻($t_{0}$)下,判断来自不同图像$I_{0}$和$I_{1}$的两个像素$u$和$v$是否对应同一个3D点,即使这个点在两张图拍摄期间发生了移动。而一个点在不同时刻的位置之差,如$P_{0}(t_{1}, \pi_{0})(u) - P_{0}(t_{0}, \pi_{0})(u)$ ,则直接给出了该点的场景流(Scene Flow)或3D运动。
三、 第二阶段:神经表征(Neural Representations)—— 连续与写实的跨越
2020年后,NeRF的出现彻底改变了我们对“地图”的认知。地图不再是一堆点或格子,而是一个神经网络。
3.1 神经辐射场(NeRF)
- 核心原理:用一个MLP $F_\theta: (x, d) \to (c, \sigma)$ 来表示场景。输入位置 $x$ 和视角 $d$,输出颜色 $c$ 和密度 $\sigma$。
- 体积渲染(Volume Rendering): \(C(r) = \int_{t_n}^{t_f} T(t) \sigma(r(t)) c(r(t), d) dt\)
- 机器人领域的困境:
- 慢:训练和渲染都极耗计算资源,难以实时 SLAM。
- 几何崩坏:NeRF主要优化视觉损失,其内部学习到的几何有时会出现“空洞”或“浮点”。
3.2 3D高斯泼溅(3D Gaussian Splatting, 3DGS)
3DGS是2023年后的绝对主角,它结合了显式(点云状)和隐式(可微渲染)的优点。
- 表征方式:由数百万个各向异性高斯分布组成。 \(G(x) = \exp\left(-\frac{1}{2}(x-\mu)^T \Sigma^{-1} (x-\mu)\right)\)
- 为什么3DGS对机器人很重要?
- 快:支持100+ FPS实时渲染。
- 显式性:均值 $\mu$ 本身就是点云,方便做碰撞检测。
- 可编辑性:比NeRF更容易通过移动高斯球来模拟物体搬运。
四、 第三阶段:基础模型(Foundation Models)—— 走向通才机器人
这是目前(2024-2025年)最前沿的方向,即将3D场景转化为大模型(LLM/VLM)能理解的“语言”。
PS:更多细节请见博客《Spatial Foundation Model/通用 3D 基础模型/Spatial Intelligence》对空间基础模型作了基本的论述,
4.1 场景Token化(Scene Tokenization)
为了让Transformer处理3D,必须将场景离散化。
- 方法:利用类似 VQ-VAE 的技术,将点云或体素 patch 映射为特定的 Codebook 索引(Token)。
- 代表作:MeshGPT, Pano-Language。
4.2 视觉-语言-动作(VLA)模型
将3D表征与语义对齐。例如,当你对机器人说“去厨房拿那个红色的杯子”,机器人不再是根据坐标导航,而是根据表征中的语义语义特征流进行匹配。
- Open-Vocabulary Map:如 ConceptFusion, VLMaps。它们在3D地图的每一个格子上不仅存储几何,还存储了来自 CLIP 模型的特征向量。
五、 机器人核心任务中的表征博弈
5.1 感知任务(Perception)
- 3D检测与分割:早期用点云卷积(PointConv),现在倾向于用多模态大模型(如 SAM3D)直接在神经表征上进行分割。
- 关键点提取:神经表征能提供更稳定的关键点,辅助机器人抓取精细物体。
5.2 SLAM(定位与建图)
- 传统 vs 神经:
- 传统 SLAM(如 ORB-SLAM3)依然是实时性之王,但在低纹理、强反光环境下经常失败。
- 神经 SLAM(如 GS-SLAM, SplaTAM)利用3DGS作为底图,能实现照片级的重构,且位姿跟踪精度正在追赶传统方法。
5.3 交互:操纵(Manipulation)与 导航(Navigation)
- 操纵:需要极其精确的接触几何。SDF和Mesh仍是主流。但最近的研究(如 GraspNeRF)表明,神经表征可以处理透明/高反光物体的抓取难题。
- 导航:
- 几何导航:解决“怎么走不撞”。
- 语义导航:解决“去哪儿”。
- 生成式导航:利用大模型生成导航代码或动作序列。
六、 终极辩论:谁才是“最好的”表征?
论文深入讨论了目前学术界的分歧。
6.1 模块化还是端到端?
- 模块化(Modular):将地图分为几何层、语义层、拓扑层。每一层服务于特定的算法。优点是可解释、安全;缺点是误差累积。
- 统一化(Unified/Foundation Model):直接把传感器输入转化成行为 Token。优点是潜力上限极高,能够处理极复杂的指令;缺点是“黑盒”,难以保证安全边界。
6.2 各种表征性能对比大表(核心干货)
| 表征方式 | 实时性 | 几何精度 | 语义能力 | 渲染质量 | 典型算法 |
|---|---|---|---|---|---|
| 点云 | 极高 | 高 | 低 | 极低 | ICP, PointNet |
| TSDF | 高 | 极高 | 低 | 中 | KinectFusion |
| NeRF | 低 | 中 | 中 | 极高 | iMAP, NICE-SLAM |
| 3DGS | 高 | 高 | 中 | 极高 | GS-SLAM, Splat-Nav |
| Token化 | 中 | 中 | 极高 | 中 | RT-2, MeshGPT |
七、 未来趋势:机器人3D表征的下半场
- 从静态到动态(Static to Dynamic): 现实世界是流动的。如何表征非刚体(如被扯动的布料、流体)是神经表征目前的重难点。
- 生成式仿真(Generative World Models): 机器人不再需要人类手动搭建仿真场景,而是通过大模型生成无限的 3D 训练数据(World Models)。
- 硬件协同(Hardware-Algorithm Co-design): 未来的机器人芯片可能不再是纯CPU/GPU,而是针对高斯泼溅或Transformer Token推理专门优化的NPU。
八、补充
除了上文阐述的三大类表征,机器人领域还存在其他一些有价值的表征范式,例如分层混合表征。这类方法试图融合不同表征的优势,以应对复杂任务的需求。
结语
综述阅读完,最深刻的感受是:没有绝对最好的表征,只有最适合任务的表征。 如果你在做高速避障,点云和体素是你的战友;如果你在做智能管家,3DGS + 语义基础模型才是未来的通途。
正如论文最后引用的那样:机器人学正从“感知世界”走向“理解并模拟世界”。