2022年OpenAI发布的CLIP模型,大大提升了模型的跨模态理解能力,实习了视觉与语言的统一,也给VLN带来新的突破————零样本学习的能力使得机器人无需依赖人工标注,即可理解自然语言指令并执行高效导航。
本博文针对基于CLIP的VLN几篇论文对其进展进行调研。
本博文仅供本人学习记录用~
- Paper List
- Blog for VLN
- Blog for CLIP
- 论文阅读笔记之《Vision-and-language navigation today and tomorrow: A survey in the era of foundation models》
1. Cows on pasture: Baselines and benchmarks for language-driven zero-shot object navigation
对于一般能用的机器人,他们需要能够寻找人类描述(也就是语言)的任意物体,即使没有对域内数据进行昂贵的导航训练(也就是要实现zero-shot性能)。因此,作者提出language-driven zero-shot object navigation (L-ZSON)。
受到最近图像分类中的开放词汇模型(open-vocabulary models)的启发,作者提出一个直接的框架——CLIP on Wheels (CoW),也就是将开放词汇模型用到这个任务中(without fine-tuning)。从这个维度上说其实就跟,CLIP用到传统CV的任务是很类似的。
而为了验证L-ZSON,作者提出了PASTURE benchmark,需要考虑到寻找查找不常见的object、由空间和外观属性描述的object,以及相对于可见object描述的隐藏object。 而作者一共验证了90k个导航的集(90k navigation episodes),发现:
- Cow baseline通常很难利用语言描述,但擅长发现不常见的对象;
- 基于CLIP的object定义及经典的探索(不需要额外training)
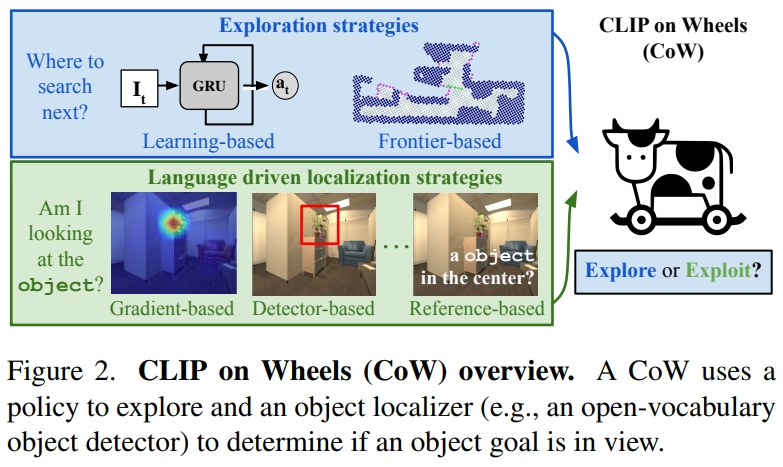
本文主要是for object localization的,但是由于有语言的输入,且属于寻找物体,因此跟目标导向的VLN几乎是一样的。对于探索的方法有基于前沿的探索(Frontier based exploration,FBE,可以理解为用地图的探索 )也有基于learning的(可以理解为用trainable GRU的hidden state来记录)
而对于采用的开发词汇分类器(open-vocabulary classifiers),通过三种策略来fine-turn CLIP模型为object localizers:
- 采用CLIP的文本编码器来编码k个引用表达,特别指定目标物体在图像的哪个区域。比如
a plant in the top left of the image。然后匹配当前观测的语言的embedding与CLIP的视觉embedding。计算图像和文本特征的相似性来决定区域的相关分数。 - 将图像离散化为k个小的patches,然后或者CLIP的patch embedding。然后将每个patch embedding与CLIP文本embeding进行卷积。如果object在patch中,对这个patch的相关分数就会很高。
- 修改一个可解析(interpretability)的方法,从ViT中提取物体的相关性。使用一个目标CLIP文本embedding以及CLIP视觉编码器的累积梯度信息,进而可以构建输入pixel的相关性的图,当object在视野中可以定性的分割目标。
对于开放词汇检测器与分割器(open-vocabulary detectors and segmentors)采用了两个额外的开发词汇模型来做object localization
- MDETR segmentation model,输入文本和图像,输出box检测。
- OWL-ViT detector用了一系列预测微调配方来将类似CLIP的方法转为物体检测。
实验测试测试了一系列基于CLIP的baseline的SR和SPL(Success weighted by inverse path length)
2. CLIP-NAV: USING CLIP FOR ZERO-SHOT VISIONAND-LANGUAGE NAVIGATION
本文与上一篇是同期提出的,开创了CLIP在导航中的另一条技术路径。相较于前者依赖全局热力图的暴力搜索策略,CLIP-NAV采用局部增量规划框架,将导航过程分解为单步决策序列:通过CLIP实时计算视觉场景与子指令(如「找厨房门」)的匹配度,直接预测最优动作(左转/直行)。
VLN要面对的场景都是比较复杂的:如任意的语言指令、多样性的环境。而CLIP等视觉语言模型在zero-shot目标识别等都展示了强大的性能,因此作者在本文中尝试探究这些方法能否实现zero-shot的language grounding。本质上跟上文是有点像的,都是把CLIP用到VLN中(without any dataset-specific finetuning),作为尝试性论文,只是上一篇以object navigation为主题,本篇更细化到VLN上。
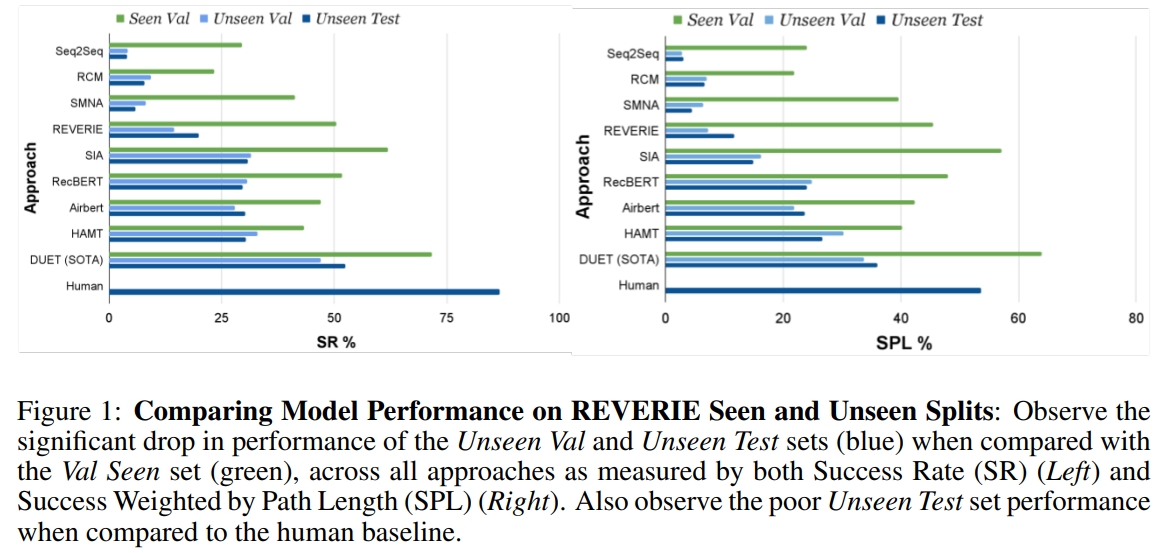
此前的VLN方法都是采用监督学习,模型首先在”seen”环境及指令下训练的,然后在”seen”以及”unseen”环境下验证.这类型的方法没见过的环境中通常有明显的性能drop.如下图所示:
此外,现有的VLN模型也都是dataset specific的,也就是在一个数据集下训练的模型难以泛化到另一个数据集上.比如在REVERIE上训练的,在SOON上可能得不到类似的结果(虽然这两个数据集都是很像的,都是coarse-grained instruction following task).不过这主要是由于训练数据不够导致的。虽然可以通过一些数据增强来改善,但是提升还是有限的。
作者所提出的方法包含三步:
- 指令分解-将粗粒度(coarse-grained)指令分解为关键短语。
- 视觉语言定位(Vision-Language Grounding)-使用CLIP在环境中找到keyphrase
- 采用CLIP的分数来做导航决策
下面也对用作者提出的指令分解方法与GPT-3做指令分解的区别


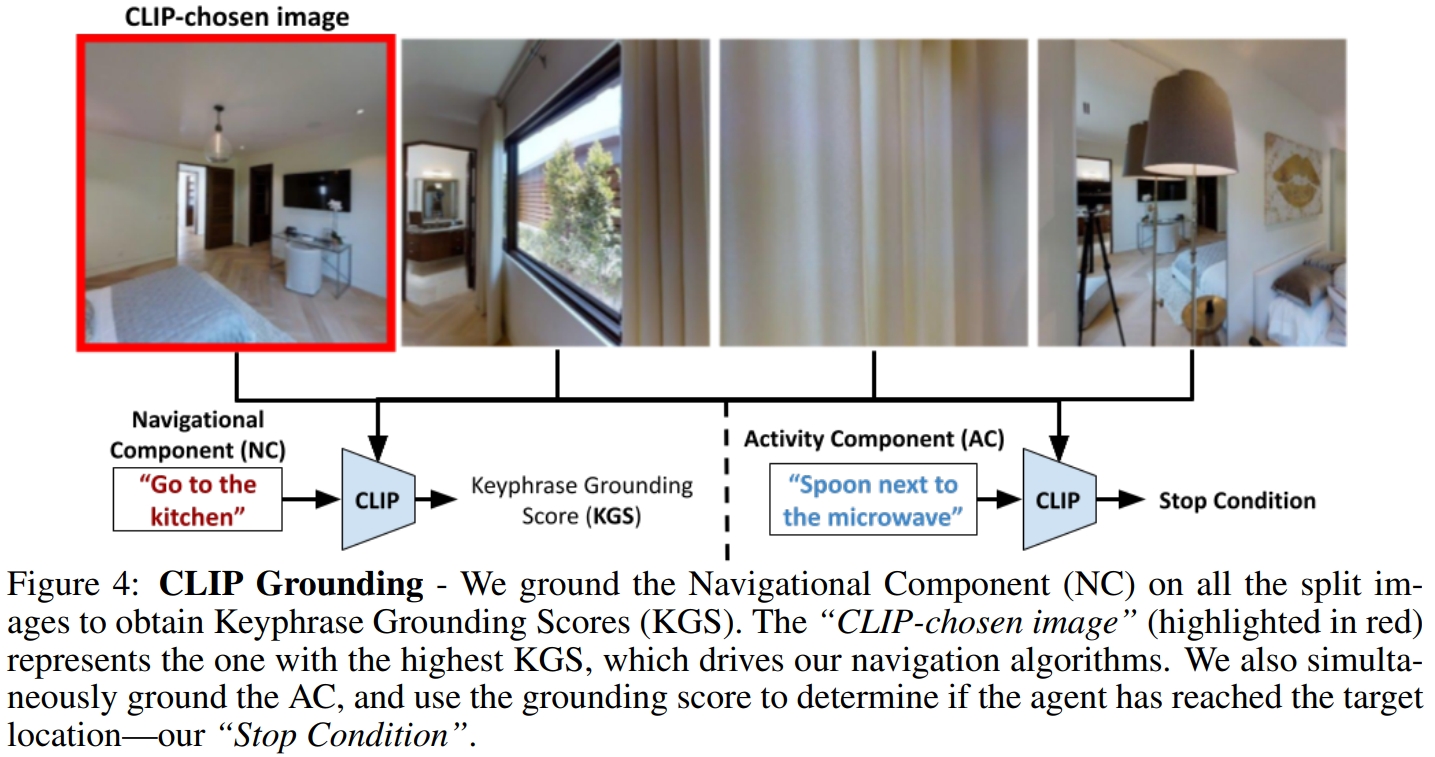
将指令分解为keyphrases后,作者就用于在Matterport3D的导航中,而Matterport3D的每个节点但都是agent的360度的全景图像,而为了选择全景图中的导航方向,作者将其分为4个分开的image,每张图包含了agent大概90度的空间。然后图片分别与语言指令通过CLIP进行匹配,选择匹配最大的为方向。其中AC指令如果超过一定的阈值或满足停止的条件时就会执行stop
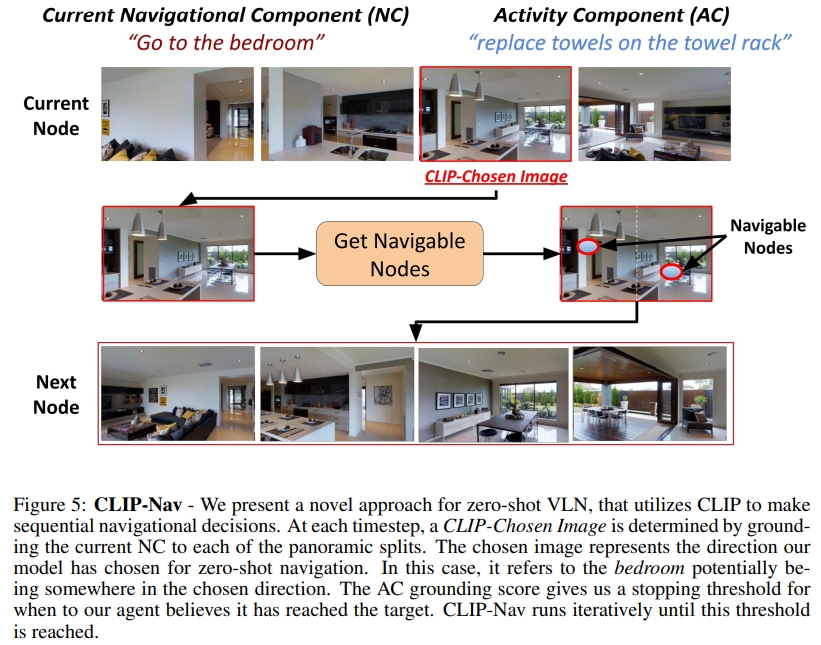
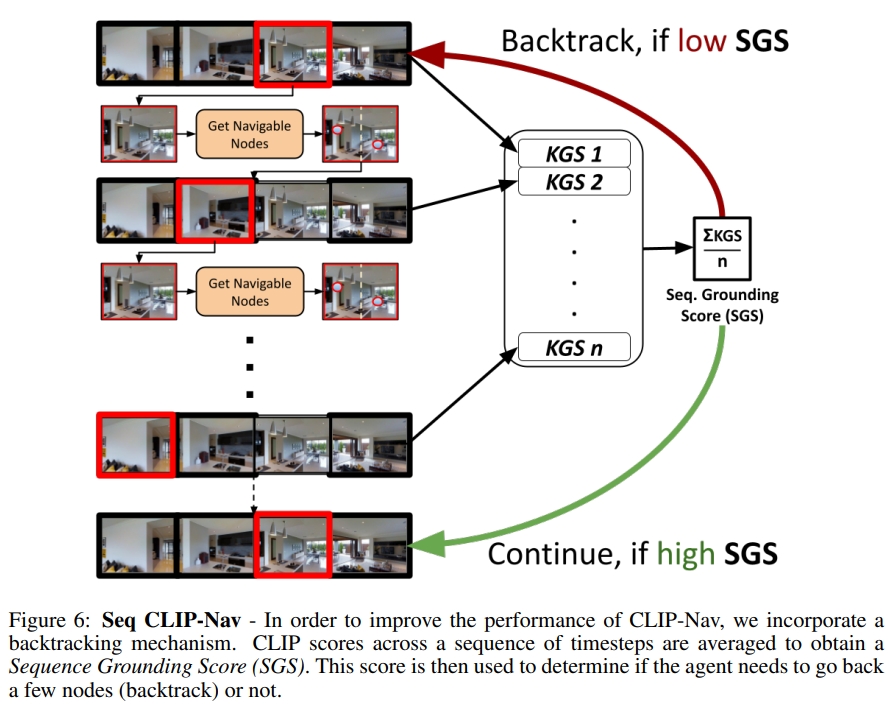
下图则是为整个CLIP-Nav的框架。每一步将全景图分为4张图像。通过CLIP选择一张图像。进而可以获得该图片对应的可以导航邻近节点,然后选择最近的节点。
此外,NC grouding score也会决定什么时候选择下一个keyphrase。比如,Go to the kitchen如果 grounding score一直高于一定的阈值,我们就假设agent可以成功导航到kitchen,并且可以执行next keyphrase。因此CLIP不仅仅是选择导航的方向,还是决定agent什么时候到达中间的目标位置。
同时由于选择节点的时候采用的是最近的节点,因此作者额外提出了一个 backtracking mechanism,如下图所示。用来决定agent是否需要回溯一些节点。
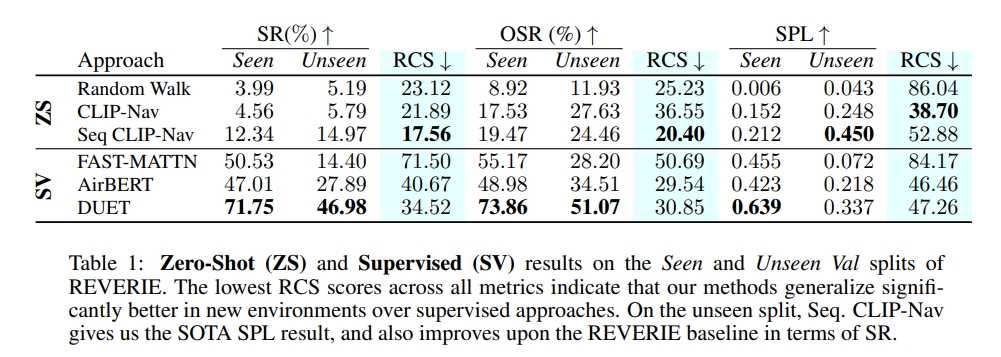
不过从实验的表格上来看,似乎并没有作者所宣称的效果,只是额外定义了Relative Change in Success (RCS)指标来证明效果更好,但是成功率这些是远不如supervised learning的
3. ESC: Exploration with Soft Commonsense Constraints for Zero-shot Object Navigation
本文提出了一种新的zero-shot的目标导航方法。软常识约束下的探索(Exploration with Soft Commonsense constraints,ESC)。通过预训练模型引入常识推理机制,而不需要导航经验或者其他的视觉环境的训练。
- ESC利用预训练视觉语言模型(GLIP)来做open-world prompt-based grounding(开放世界提示定位)以及采用预训练的commonsense 语言模型来做房间和物体的推理(这部分属于场景理解/scene understanding)。
- ESC通过把导航动作建模为用于高效探索的软逻辑词(soft logic predicates),实现将commonsense知识转换为导航action,这部分(Frontier-based Exploration 和Probabilistic Soft Logic,PSL)就是将大语言模型(LLM)推理的commonsense知识转换为执行action。
而本文验证也是以object goal navigation的benchmark来评估的。
ESC框架如下图所示。首先将输入的图像转换为场景的语言理解,然后将其投影为语义地图(semantic map),然后利用LLM来进行常识推理,进而获取目标物体与其他物体、房间的空间关系。最后通过结合Frontier-based Exploration与场景语义理解,还有通过Probabilistic Soft Logic实现commonsense的推理。
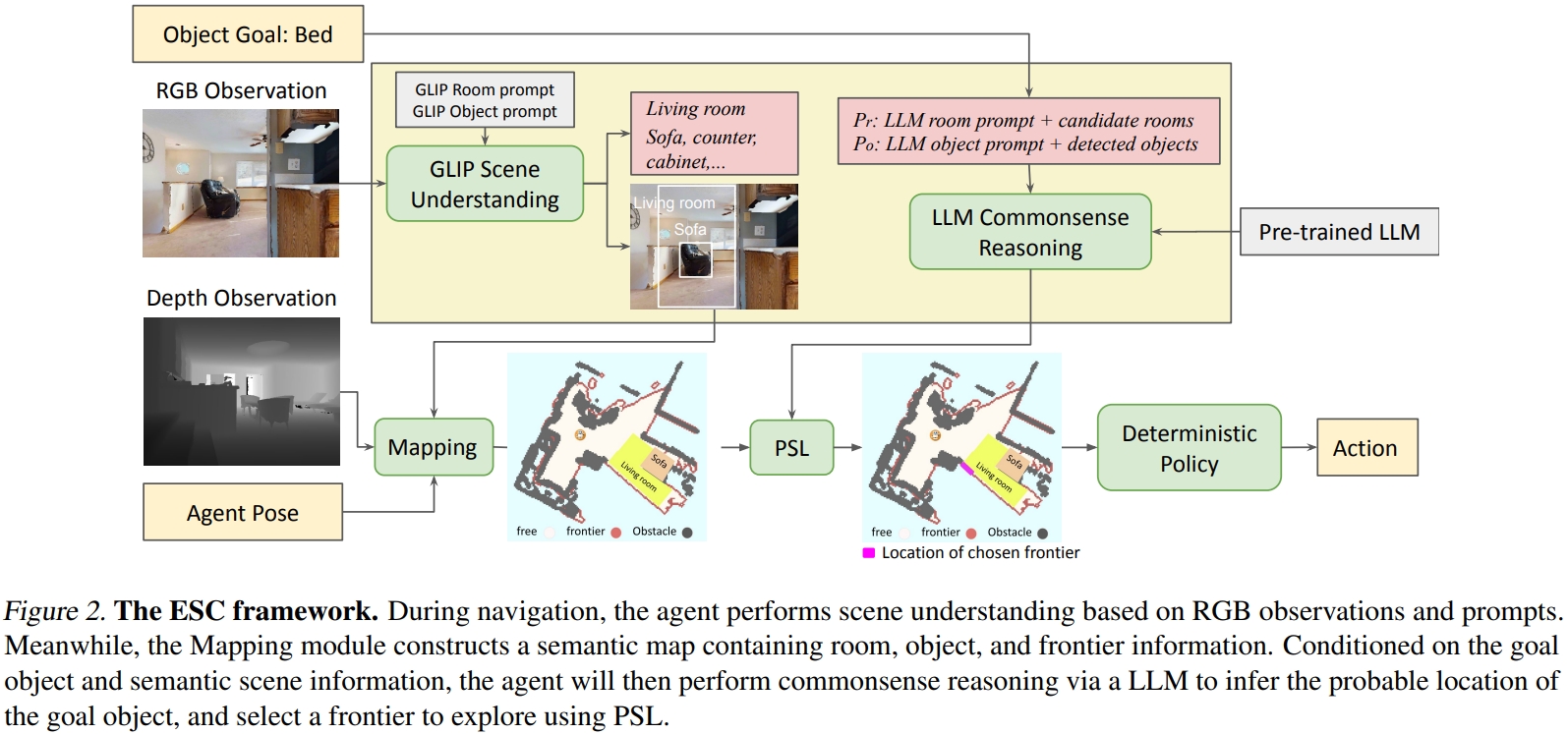
- 开放世界语义理解:为了利用LLM来做导航推理,需要将输入的RGB图像转换为语言形式的语言内容。这部分的实现是采用GLIP
- 语言地图的构建(Semantic Map Construction):基于输入的depth,agent的位置,相机的参数,可以实现2D图像pixel转换到3D空间,并且存储为3D voxel的形式,然后再将其沿着高度维度进行投影即可获得2D导航地图(其实也就是栅格地图)
对于探索采用的是一种启发式探索方法,基于边界的探索(Frontier-based Exploration,FBE)
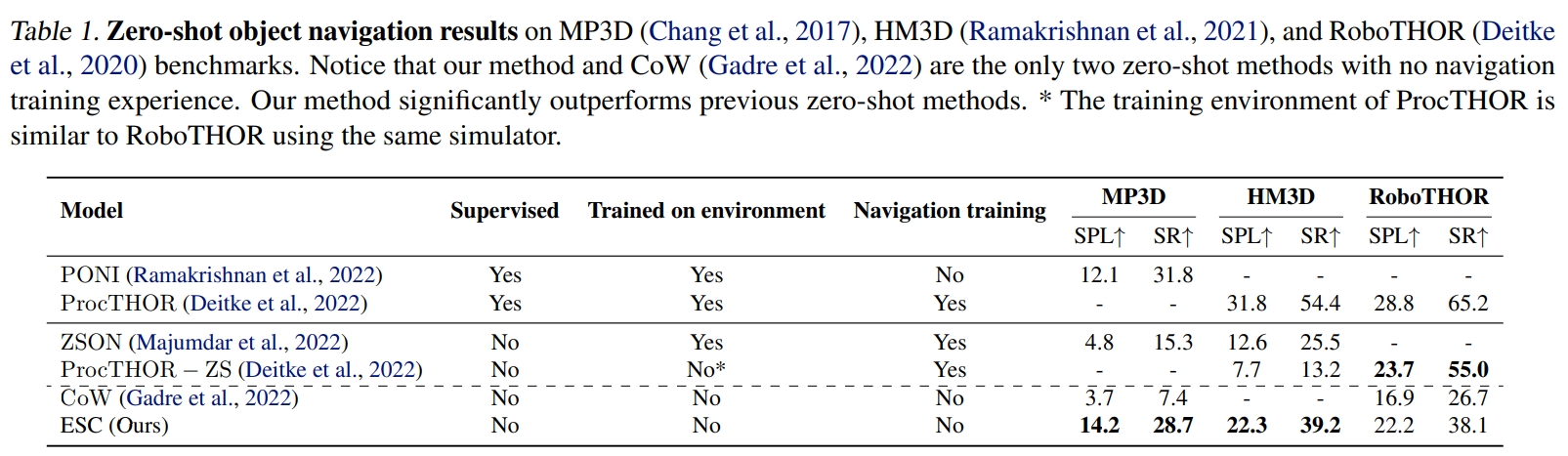
至于性能效果则是比前面的CoW要好不少。
最后值得一提的是,写这篇博文的初衷其实是参考了这篇文献推文的10年VLN之路:详解具身智能「视觉-语言-导航」三大技术拐点!当时觉得这篇推文写得很差,每个字都懂连起来既没有逻辑性,又没有连贯性,所以打算针对性的把里面提到VLN的四个CLIP工作阅读一下,结果读了3个发现两个都不是直接跟VLN有关系的😂并且也没有一个明显的技术发展的脉络。。。。。。
补充,下面的也不是😂
不过勉强也是可以跟VLN扯上关系的,只是这是以探索或者说物体/目标导航为主的,或者可以理解为目标导向的VLN
4. VLFM: Vision-Language Frontier Maps for Zero-Shot Semantic Navigation
所谓的Vision-Language Frontier Maps(VLFM)是受到了人类推理的启发,旨在在新环境中导航到unseen的语义object。 VLFM通过输入的深度观测构建栅格地图(occupancy map)。利用RGB观测以及预训练的视觉-语言模型来生成language-grounded value map。 VLFM利用这张map来识别最promising frontier(最有前途的前沿)来探索给定的物体类型。 VLFM通过预训练的VLM来选择哪个frontiers是最可能到达语义目标区域。与此前的工作不一样,不再依赖于目标检测或者语义模型进行文本推理,而是采用视觉-语言模型,直接从RGB中提取语义值,然后通过与文本构建cosine similarity score来定位目标。 并且其zero-shot的特性也使得它可以移植到波士顿动力移动操作平台上。
如下图所示,框架可以分为三部分:
- 初始化/initialization:机器人原地旋转一整圈,以建立其边界(frontier)和language-grounded value map。
- 探索/exploration:机器人持续更新边界(frontier)和value map,以创建frontier waypoints,并选择最有价值的航路点来定位指定的目标对象类别并导航到它。一旦找到目标object类别,就会导航过去。
- 目标导航/goal navigation:机器人简答的导航到最靠近所检测的目标物体的地方,然后触发
STOP.
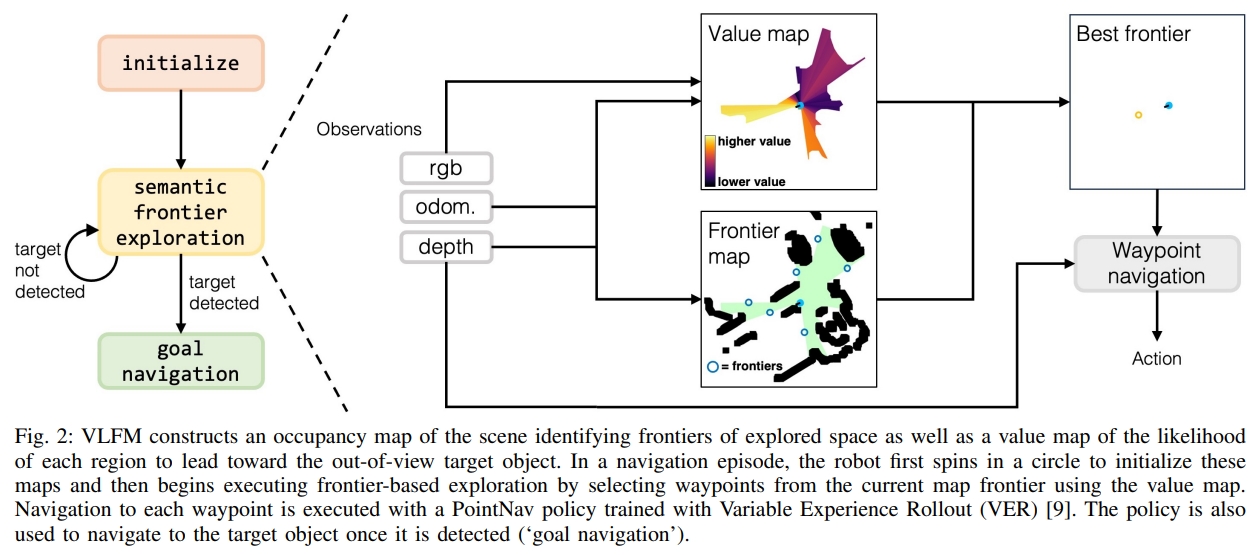
- 对于Frontier waypoint generation:采用depth以及里程计观测来构建障碍物的top-down 2D地图。基于机器人的位置会更新可探索的区域。对于障碍物的位置,通过把depth image转换为point cloud,然后投影到2D栅格上。进一步的,识别区分探索与未探索区域的边界,用其midpoint作为潜在的frontier waypoint。随着机器人探索区域,frontier的数量和位置都会变化,直到整个环境都被探索了且没有frontier。
- 对于Value map generation:作者采用预训练好的视觉语言模型,BLIP-2(CLIP的图像到文本检索),来直接从机器人当前的RGB观测以及包含目标物体的txet prompt来计算cosine similarity score。而这个score会进一步的投影成value map。这个值是用作confidence value来辅助frontiers的选择以及目标的定位的。
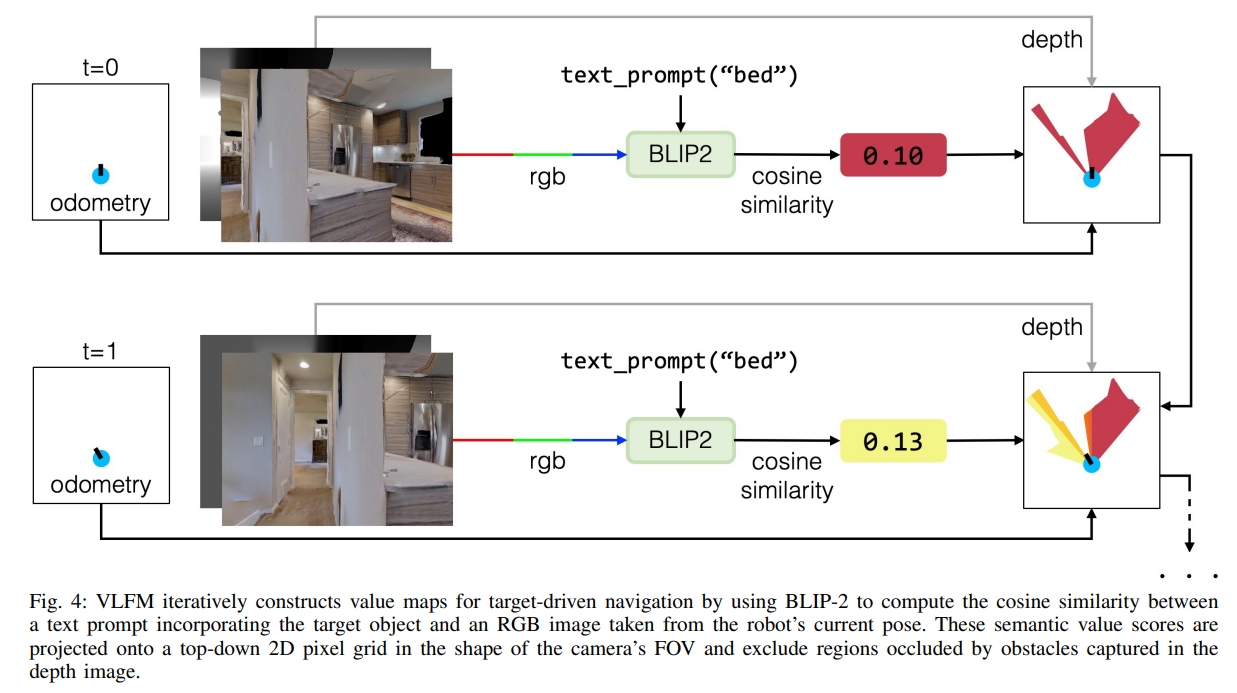
至于最终的物体检测采用的是Grounding-DINO。
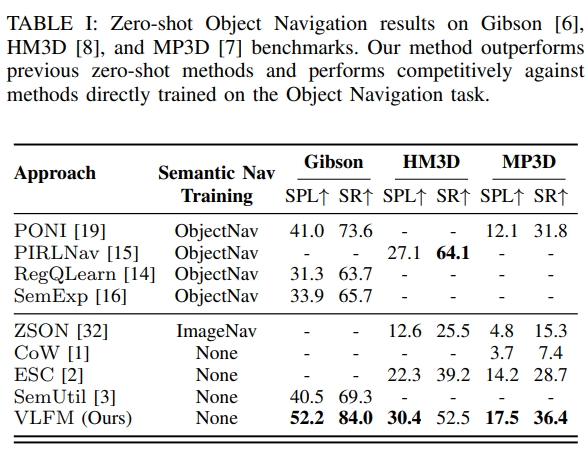
从实验结果来看,虽然比起其他方法都有一定的提升,但是在不同数据集下的差异还是比较大的~
论文网站上有对应的实验demo。