D-LIOM是22年的Transactions on Multimedia,采用的是cartographer+IMU预积分紧耦合的形式。
- github
- 本博文复现过程采用的代码及代码注释(如有):My github repository
原理解读
D-LIOM的主要特点如下:
- 直接法,雷达原始的扫描点与probability submap进行register
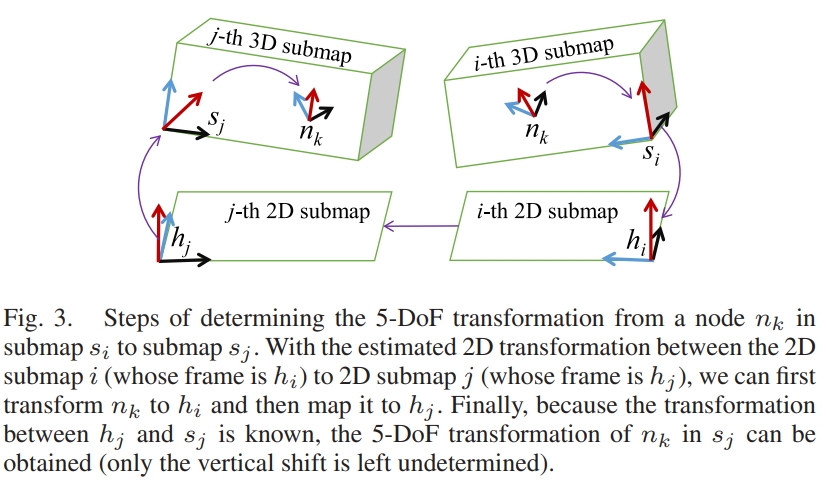
- lidar odometry、IMU预积分、重力约束整合一起构建局部因子图(submap’s time window),同时矫正IMU的biases,online gravity估计(限制roll与pitch的漂移,也可以较好的实现将3D submap投影到2D平面实现回环);
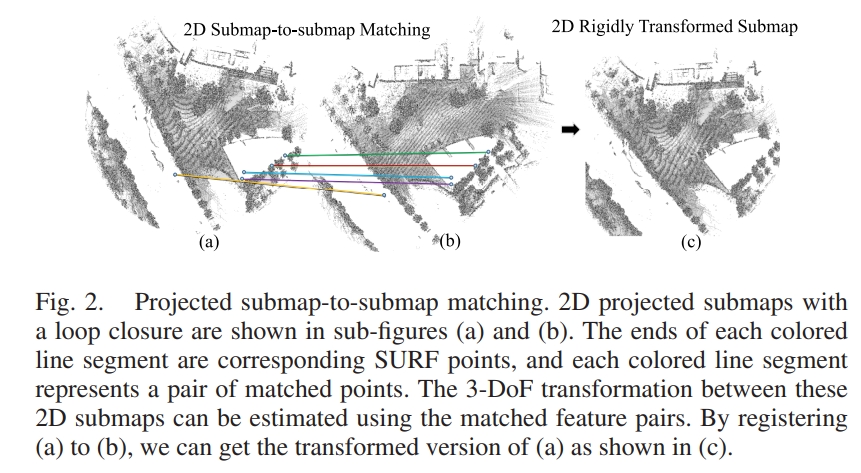
- 通过2D submaps(用的cartographer的回环检测)的相互匹配实现回环检测
- 支持多个雷达输入、雷达与6轴IMU的初始。
- 对于点云去失真,用的是上一时刻优化后的状态以及biases,然后通过IMU预积分进行去畸变。
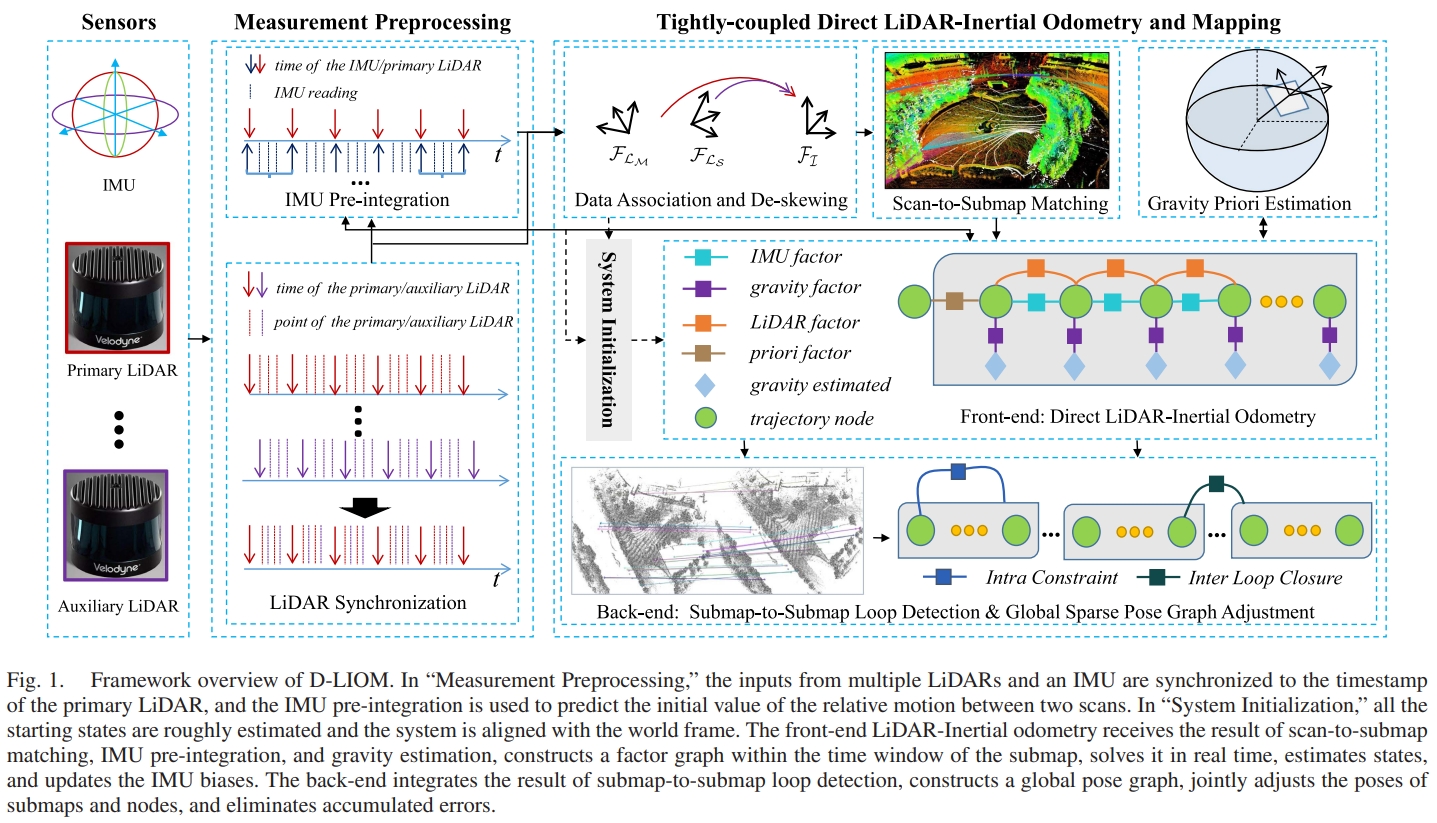
- 对于lidar odometry采用的是occupied voxel map;
- 回环检测采用的提取3D submap投影的2D image,对2D image进行特征点匹配
代码阅读
类概述
这是 Cartographer 3D SLAM 的核心组件,特点:
- 3D 环境建图:处理三维点云数据
- IMU 融合:紧耦合 IMU-激光雷达
- 多分辨率优化:使用高分辨率和低分辨率栅格
- 在线重力估计:动态估计重力方向
构造函数详细分析
LocalTrajectoryBuilder3D::LocalTrajectoryBuilder3D(
const mapping::proto::LocalTrajectoryBuilderOptions3D& options,
const std::vector<std::string>& expected_range_sensor_ids)
: options_(options),
active_submaps_(options.submaps_options()), // 3D 子图管理器
motion_filter_(options.motion_filter_options()), // 运动滤波器
real_time_correlative_scan_matcher_(
common::make_unique<scan_matching::RealTimeCorrelativeScanMatcher3D>(
options_.real_time_correlative_scan_matcher_options())), // 3D 实时扫描匹配器
ceres_scan_matcher_(
common::make_unique<scan_matching::CeresScanMatcher3D>(
options_.ceres_scan_matcher_options())), // 3D Ceres 扫描匹配器
accumulated_range_data_{Eigen::Vector3f::Zero(), {}, {}}, // 累积点云数据
range_data_synchronizer_(expected_range_sensor_ids) // 数据同步器
{
// 从配置中读取参数
scan_period_ = options_.scan_period(); // 扫描周期
eable_mannually_discrew_ = options_.eable_mannually_discrew(); // 是否手动去螺钉
frames_for_static_initialization_ = options_.frames_for_static_initialization(); // 静态初始化帧数
frames_for_dynamic_initialization_ = options_.frames_for_dynamic_initialization(); // 动态初始化帧数
g_est_win_size_ = options_.frames_for_online_gravity_estimate(); // 在线重力估计窗口大小
// IMU 参数(从配置文件中读取,比 2D 版本更灵活)
const float imuAccNoise = options_.imu_options().acc_noise();
const float imuGyrNoise = options_.imu_options().gyr_noise();
const float imuAccBiasN = options_.imu_options().acc_bias_noise();
const float imuGyrBiasN = options_.imu_options().gyr_bias_noise();
const float imuGravity = options_.imu_options().gravity();
const float prior_pose_n = options_.imu_options().prior_pose_noise();
const float prior_gravity_noise = options_.imu_options().prior_gravity_noise();
const float ceres_pose_n_t = options_.imu_options().ceres_pose_noise_t();
const float ceres_pose_n_r = options_.imu_options().ceres_pose_noise_r();
const float ceres_pose_n_t_1 = options_.imu_options().ceres_pose_noise_t_drift();
const float ceres_pose_n_r_1 = options_.imu_options().ceres_pose_noise_r_drift();
// GTSAM 预积分参数设置(与 2D 版本类似但为 3D)
preint_param_ = gtsam::PreintegrationParams::MakeSharedU(imuGravity);
preint_param_->accelerometerCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuAccNoise, 2);
preint_param_->gyroscopeCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuGyrNoise, 2);
preint_param_->integrationCovariance = gtsam::Matrix33::Identity(3,3) * pow(1e-4, 2);
// 噪声模型初始化
prior_pose_noise_ = gtsam::noiseModel::Diagonal::Sigmas(
(gtsam::Vector(6) << prior_pose_n, prior_pose_n, prior_pose_n,
prior_pose_n, prior_pose_n, prior_pose_n).finished());
prior_vel_noise_ = gtsam::noiseModel::Isotropic::Sigma(3, 1e4);
prior_bias_noise_ = gtsam::noiseModel::Isotropic::Sigma(6, 1e-2);
prior_gravity_noise_ = gtsam::noiseModel::Diagonal::Sigmas(
(gtsam::Vector(2) << prior_gravity_noise, prior_gravity_noise).finished());
// 修正噪声模型(两种级别)
correction_noise_ = gtsam::noiseModel::Diagonal::Sigmas(
(gtsam::Vector(6) << ceres_pose_n_t, ceres_pose_n_t, ceres_pose_n_t,
ceres_pose_n_r, ceres_pose_n_r, ceres_pose_n_r).finished());
correction_noise_2_ = gtsam::noiseModel::Diagonal::Sigmas(
(gtsam::Vector(6) << ceres_pose_n_t_1, ceres_pose_n_t_1, ceres_pose_n_t_1,
ceres_pose_n_r_1, ceres_pose_n_r_1, ceres_pose_n_r_1).finished());
// 偏置噪声模型
noise_model_between_bias_ = (gtsam::Vector(6) <<
imuAccBiasN, imuAccBiasN, imuAccBiasN,
imuGyrBiasN, imuGyrBiasN, imuGyrBiasN).finished();
// VINS 风格积分器初始化(用于动态初始化)
imu_noise_.ACC_N = imuAccNoise;
imu_noise_.ACC_W = imuAccBiasN;
imu_noise_.GYR_N = imuGyrNoise;
imu_noise_.GYR_W = imuGyrBiasN;
init_integrator_.reset(new IntegrationBase(INIT_BA, INIT_BW, imu_noise_));
// 初始化环形缓冲区(用于动态初始化)
InitCircularBuffers();
}
核心功能详细分析
点云处理流程 (AddRangeData)
std::unique_ptr<TightTrajectoryBuilder2D::MatchingResult>
TightTrajectoryBuilder2D::AddRangeData(const std::string &sensor_id,
const sensor::TimedPointCloudData &unsynchronized_data) {
// Step 1: 多传感器时间同步
// 将不同传感器的数据对齐到同一时间戳
auto synchronized_data =
m_range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
// 如果同步后数据为空,直接返回
if (synchronized_data.ranges.empty()) {
return nullptr;
}
// 保存当前点云的时间戳
const common::Time& time = synchronized_data.time;
time_point_cloud_ = time; // 保存用于后续优化
// 检查IMU是否完成初始化
if (!imu_initialized_)
{
// 如果静态初始化需要的帧数已够,开始初始化
if (accumulated_frame_num++ > frames_for_static_initialization_)
{
InitializeStatic(); // 调用静态初始化
}
return nullptr; // 初始化期间不处理点云
}
// 检查点云数据的有效性
CHECK(!synchronized_data.ranges.empty()); // 确保非空
CHECK_LE(synchronized_data.ranges.back().point_time.time, 0.f); // 最后一点时间应<=0(相对时间)
// 计算第一个点的时间
const common::Time time_first_point =
time +
common::FromSeconds(synchronized_data.ranges.front().point_time.time);
// 如果是本批次的第一帧,记录开始时间
if (mi_num_accumulated_ == 0)
{
accumulation_started_ = std::chrono::steady_clock::now();
}
// Step 2: 点云体素滤波,减少数据量
std::vector<sensor::TimedPointCloudOriginData::RangeMeasurement> hits =
sensor::VoxelFilter(synchronized_data.ranges, m_options_.voxel_filter_size());
// Step 3: 准备用于运动畸变去除的位姿
std::vector<transform::Rigid3f> range_data_poses;
range_data_poses.reserve(hits.size()); // 预分配空间
transform::Rigid3d tmp_pose; // 临时位姿变量
// 获取当前预测状态和上一状态,计算相对变换
transform::Rigid3d cur_state_pre, rel_trans;
if (predicted_states_.empty()) return nullptr; // 无预测状态,返回
// 从GTSAM状态中提取位姿
cur_state_pre = PoseFromGtsamNavState(predicted_states_.back().second);
rel_trans = PoseFromGtsamNavState(prev_state_).inverse() * cur_state_pre;
SLAM_INFO("cur_state_pre : [%f, %f], rel_trans : [%f, %f]",
cur_state_pre.translation().x(), cur_state_pre.translation().y(),
rel_trans.translation().x(), rel_trans.translation().y());
// Step 4: 为每个激光点计算对应的位姿
if (std::abs(hits.front().point_time.time) < 1e-3)
{
// 如果第一个点的时间接近0,认为所有点是同一时刻采集的
SLAM_INFO("hit point time : [%f]", hits.front().point_time.time);
range_data_poses = std::vector<transform::Rigid3f>(
hits.size(), cur_state_pre.cast<float>()); // 所有点用同一位姿
}
else
{
// 需要为每个点插值位姿
const double sample_period = scan_period_; // 0.1秒
for (const auto& hit : hits)
{
// 计算每个点的绝对时间
common::Time time_point = time + common::FromSeconds(hit.point_time.time);
// 计算插值比例 s = (周期 + 点时间) / 周期
// 假设点云在扫描周期内均匀采集
double s = (sample_period + hit.point_time.time) / sample_period;
// 插值得到该点时刻的位姿
InterpolatePose(s, rel_trans, tmp_pose);
// 转换到世界坐标系
auto pose = (PoseFromGtsamNavState(prev_state_) * tmp_pose).cast<float>();
SLAM_INFO("pose : [%f, %f], s : [%f]",
pose.translation().x(), pose.translation().y(), s);
range_data_poses.push_back(pose);
}
}
// Step 5: 清理过时的状态缓存
TrimStatesCache(time);
// Step 6: 累积点云处理
if (mi_num_accumulated_ == 0) {
m_accumulated_range_data_ = sensor::RangeData{{}, {}, {}}; // 重置累积点云
}
// 遍历所有点,去除运动畸变
for (size_t i = 0; i < hits.size(); ++i)
{
const sensor::TimedRangefinderPoint& hit = hits[i].point_time;
// 将激光原点转换到local坐标系
const Eigen::Vector3f origin_in_local =
range_data_poses[i] *
synchronized_data.origins.at(synchronized_data.ranges[i].origin_index);
// 将激光点转换到local坐标系
sensor::RangefinderPoint hit_in_local =
range_data_poses[i] * sensor::ToRangefinderPoint(hit);
// 计算激光射线向量
const Eigen::Vector3f delta = hit_in_local.position - origin_in_local;
const float range = delta.norm(); // 距离
// 根据距离分类处理
if (range >= m_options_.min_range()) // 超过最小距离
{
if (range <= m_options_.max_range()) // 在最大距离内
{
m_accumulated_range_data_.returns.push_back(hit_in_local); // 有效点
}
else // 超过最大距离
{
// 将点截断到最大距离(或missing_data_ray_length)
hit_in_local.position =
origin_in_local + m_options_.missing_data_ray_length() / range * delta;
m_accumulated_range_data_.misses.push_back(hit_in_local); // 无效点
}
}
}
// Step 7: 累积帧数加1
++mi_num_accumulated_;
// Step 8: 如果累积了足够的帧数,进行扫描匹配
// m_options_.num_accumulated_range_data() 是可配置的参数
if (mi_num_accumulated_ >= m_options_.num_accumulated_range_data()) {
mi_num_accumulated_ = 0; // 重置计数器
// 获取当前位姿(最后一个点的位姿)
transform::Rigid3f current_pose = range_data_poses.back();
// 设置累积点云的原点
m_accumulated_range_data_.origin = current_pose.translation();
// 调用处理累积点云的函数
return AddAccumulatedRangeData(time,
TransfromToGravityAlignedFrameAndFilter(
current_pose.inverse(), // 转换到重力对齐坐标系
m_accumulated_range_data_),
current_pose.cast<double>()); // 预测位姿
}
return nullptr; // 还未累积够帧数,返回空
}
运动畸变去除
// 位姿插值函数:根据时间比例插值相对位姿
void TightTrajectoryBuilder2D::InterpolatePose(const double timestamp_ratio,
const transform::Rigid3d &relative_transform,
transform::Rigid3d &pose_t) {
// 使用球面线性插值(Slerp)进行旋转插值
Eigen::Quaterniond q = Eigen::Quaterniond::Identity().slerp(
timestamp_ratio, relative_transform.rotation());
// 线性插值平移
Eigen::Vector3d t = timestamp_ratio * relative_transform.translation();
// 组合成完整的位姿
pose_t = transform::Rigid3d(t, q);
}
两种初始化方式
- 静态初始化函数详解
void TightTrajectoryBuilder2D::InitializeStatic()
{
Eigen::Vector3d accel_accum; // 加速度累积
Eigen::Vector3d gyro_accum; // 角速度累积
int num_readings = 0;
accel_accum.setZero();
gyro_accum.setZero();
// 计算平均值
for(const auto& entry : init_imu_buffer_opt_){
accel_accum += entry.linear_acceleration;
gyro_accum += entry.angular_velocity;
num_readings++;
}
Eigen::Vector3d accel_mean = accel_accum / num_readings;
Eigen::Vector3d gyro_mean = gyro_accum / num_readings;
// 重力向量(世界坐标系)
g_vec_ << 0.0, 0.0, -9.8;
// 初始状态
P_.setZero(); // 位置为零
V_.setZero(); // 速度为零
// 通过重力方向计算初始姿态
// FromTwoVectors: 从accel_mean到-g_vec_的旋转
R_ = Eigen::Quaternion<double>::FromTwoVectors(accel_mean, -g_vec_);
// 计算偏置
// 加速度偏置 = 旋转后的重力 + 测量的加速度均值
Ba_ = R_.transpose() * g_vec_ + accel_mean;
Bg_ = gyro_mean; // 陀螺仪偏置直接取均值
// 完成IMU初始化
InitializeIMU();
}
- NDT 动态初始化 (InitilizeByNDT)
void LocalTrajectoryBuilder3D::InitilizeByNDT(
const common::Time& time,
const sensor::TimedPointCloudOriginData& synchronized_data){
// 步骤 1: 如果是第一帧,初始化 NDT 参数
if(!last_scan_){
// 设置 NDT 参数
ndt_.setTransformationEpsilon(0.01); // 变换收敛阈值
ndt_.setStepSize(0.1); // 步长
ndt_.setResolution(1.0); // 体素分辨率
ndt_.setMaximumIterations(35); // 最大迭代次数
// ... 其他初始化
}else{
// 步骤 2: 使用 IMU 预积分作为初始猜测
Eigen::Quaternionf init_q = init_integrator_->deltaQij().cast<float>();
Eigen::Matrix3f init_R(init_q);
Eigen::Vector3f init_t(linear_velocity_ * dt_);
Eigen::Matrix4f init_guess = Eigen::Matrix4f::Identity();
init_guess.block(0,0,3,3) = init_R;
init_guess.block(0,3,3,1) = init_t;
// 步骤 3: 进行 NDT 匹配
MatchByNDT(last_scan_, cur_scan, init_guess, R, t);
// 步骤 4: 保存变换和预积分
plt.transform = transform::Rigid3d(t.cast<double>(),
Eigen::Quaterniond(all_laser_transforms_[buffered_scan_count_ - 1]
.transform.rotation().toRotationMatrix() * R.cast<double>()));
plt.pre_integration = imu_int_init_pt;
// 步骤 5: 更新速度估计
linear_velocity_ = t / dt_;
angular_velocity_ = transform::RotationQuaternionToAngleAxisVector(
Eigen::Quaternionf(R)) / dt_;
}
// 步骤 6: 当收集足够帧数后,与世界坐标系对齐
if(buffered_scan_count_ == frames_for_dynamic_initialization_ + 1){
if(!AlignWithWorld()){
LOG(ERROR)<<"Initialization failed!";
}else{
// 初始化成功,设置状态
InitializeIMU();
}
}
}
与世界坐标系对齐 (AlignWithWorld)
bool LocalTrajectoryBuilder3D::AlignWithWorld() {
// 步骤 1: 检查 IMU 可观性(类似 VINS-Mono)
// 计算加速度方差,确保 IMU 数据有足够的运动
// 步骤 2: 使用 VINS 风格的初始化器
bool init_result = Initializer::Initialization(
all_laser_transforms_, transform_lb_,
options_.imu_options().gravity(),
Vs_, Bgs_, g_vec_in_laser);
// 步骤 3: 重力对齐
// 激光坐标系下的重力向量
g_vec_in_base = -g_vec_in_laser; // 取反(根据 VINS 公式)
// 计算从 IMU 坐标系到世界坐标系的旋转
R_ = Eigen::Quaternion<double>::FromTwoVectors(
g_vec_in_base.normalized(), g_vec_.normalized());
// 步骤 4: 将所有状态转换到世界坐标系
for (int i = 0; i < frames_for_dynamic_initialization_ + 1; i++) {
Ps_[i] = (R_ * Ps_[i]).eval();
Rs_[i] = (R_ * Rs_[i]).eval();
Vs_[i] = (R_ * Vs_[i]).eval();
}
return true;
}
在线重力估计 (EstimateGravity)
bool LocalTrajectoryBuilder3D::EstimateGravity(){
// 步骤 1: 收集当前状态到滑动窗口
Eigen::Quaterniond rot = prev_pose_.rotation().quaternion();
Eigen::Vector3d pos = Eigen::Vector3d(prev_pose_.x(), prev_pose_.y(), prev_pose_.z());
transform::Rigid3d tsf(pos, rot);
std::shared_ptr<gtsam::PreintegratedImuMeasurements> cur_intgrator;
cur_intgrator.reset(new gtsam::PreintegratedImuMeasurements(*imu_integrator_opt_));
Rigid3dWithPreintegrator tsf_pre_int(cur_intgrator, tsf);
g_est_transforms_.push_back(tsf_pre_int);
g_est_Vs_.push_back(Eigen::Vector3d(prev_vel_.x(), prev_vel_.y(), prev_vel_.z()));
// 步骤 2: 维护滑动窗口
if(g_est_transforms_.size() > g_est_win_size_ + 1){
g_est_transforms_.pop_front();
g_est_Vs_.pop_front();
// 步骤 3: 转换到窗口的第一帧
const auto& T_w_inv = g_est_transforms_.front().transform.inverse();
for(int i = 0; i < g_est_transforms_.size(); ++i){
auto& tsf = g_est_transforms_tmp_[i];
tsf.transform = T_w_inv * tsf.transform; // 变换到窗口起始帧
const auto& R_w_inv = g_est_transforms_[i].transform.rotation().inverse();
g_est_Vs_[i] = R_w_inv * g_est_Vs_[i]; // 速度转换到当前帧
}
// 步骤 4: 使用重力估计器
if(g_estimator_.Estimate(
g_est_transforms_tmp_, transform_lb_, g_est_Vs_,
options_.imu_options().gravity(), g_vec_est_B_)){
// 步骤 5: 转换到世界坐标系
g_vec_est_G_ = g_est_transforms_.front().transform
.rotation().toRotationMatrix() * (-g_vec_est_B_);
// 步骤 6: 检查重力估计的合理性
if(g_vec_est_G_[2] + options_.imu_options().gravity() < 0.5){
return true;
}
}
}
return false;
}
AddAccumulatedRangeData 函数详解
这个函数处理累积的多帧点云:
std::unique_ptr<TightTrajectoryBuilder2D::MatchingResult>
TightTrajectoryBuilder2D::AddAccumulatedRangeData(common::Time time,
const sensor::RangeData &filtered_range_data_in_tracking,
const transform::Rigid3d &pose_prediction) {
// 检查点云是否有效
if (filtered_range_data_in_tracking.returns.empty()) {
SLAM_WARN("Dropped empty horizontal range data. ");
return nullptr;
}
if (filtered_range_data_in_tracking.returns.size() < 50) {
SLAM_WARN("Miss lots of horizontal range data. ");
return nullptr;
}
transform::Rigid3d pose_estimate; // 估计的位姿
// Step 1: 自适应体素滤波
const sensor::PointCloud& filtered_gravity_aligned_point_cloud =
sensor::AdaptiveVoxelFilter(filtered_range_data_in_tracking.returns,
m_options_.adaptive_voxel_filter_options());
// Step 2: 如果有子图,进行扫描匹配
if (!m_active_submaps_.submaps().empty())
{
// 获取当前子图
std::shared_ptr<const mapping::Submap2D> matching_submap =
m_active_submaps_.submaps().front();
// 将预测位姿转换到子图坐标系
transform::Rigid2d initial_ceres_pose =
transform::Project2D(matching_submap->local_pose().inverse() * pose_prediction);
if (filtered_gravity_aligned_point_cloud.empty()) {
SLAM_WARN("filtered_gravity_aligned_point_cloud is empty. ");
return nullptr;
}
// Step 3: 可选的相关性扫描匹配(提高初始位姿精度)
if (m_options_.use_online_correlative_scan_matching())
{
const transform::Rigid2d initial_pose = initial_ceres_pose;
double score = m_real_time_correlative_scan_matcher_.Match(
initial_pose,
filtered_gravity_aligned_point_cloud,
*matching_submap->grid(),
&initial_ceres_pose);
current_match_score_ = score; // 保存匹配分数
}
// Step 4: Ceres扫描匹配
transform::Rigid2d pose_observation_in_submap;
ceres::Solver::Summary summary;
m_ceres_scan_matcher_.Match(
initial_ceres_pose.translation(), // 初始平移
initial_ceres_pose, // 初始位姿
filtered_gravity_aligned_point_cloud, // 点云
*matching_submap->grid(), // 子图栅格
&pose_observation_in_submap, // 输出:子图坐标系下的位姿
&summary); // 优化摘要
// 转换回世界坐标系
pose_estimate = matching_submap->local_pose() * transform::Embed3D(pose_observation_in_submap);
}
else // 没有子图,使用预测值
{
SLAM_INFO("m_active_submaps_.submaps() is empty. ");
pose_estimate = pose_prediction;
}
// Step 5: 紧耦合优化
WindowOptimize(pose_estimate, false);
// 获取优化后的位姿
auto opt_pose = PoseFromGtsamNavState(prev_state_);
// Step 6: 重力对齐
const Eigen::Quaterniond gravity_alignment = opt_pose.rotation();
// 将点云转换到local坐标系
sensor::RangeData range_data_in_local =
sensor::TransformRangeData(filtered_range_data_in_tracking, opt_pose.cast<float>());
// Step 7: 插入子图
std::unique_ptr<InsertionResult> insert_result = InsertIntoSubmap(
time, range_data_in_local, filtered_gravity_aligned_point_cloud,
opt_pose, gravity_alignment);
// Step 8: 返回匹配结果
return absl::make_unique<MatchingResult>(MatchingResult{
time, opt_pose,
std::move(range_data_in_local), std::move(insert_result),
mi_current_match_state, current_match_score_});
}
核心优化函数 WindowOptimize 详解
void TightTrajectoryBuilder2D::WindowOptimize(
const transform::Rigid3d &matched_pose, bool is_drift)
{
// Step 1: 获取当前时间戳
double currentCorrenntionTime = common::ToSecondsStamp(time_point_cloud_);
// Step 2: 从匹配位姿提取位置和四元数
float p_x = matched_pose.translation().x();
float p_y = matched_pose.translation().y();
float p_z = matched_pose.translation().z();
float r_x = matched_pose.rotation().x();
float r_y = matched_pose.rotation().y();
float r_z = matched_pose.rotation().z();
float r_w = matched_pose.rotation().w();
bool degenerate = is_drift; // 是否处于漂移状态
// 转换为GTSAM的位姿格式
gtsam::Pose3 lidarPose = gtsam::Pose3(gtsam::Rot3::Quaternion(r_w, r_x, r_y, r_z),
gtsam::Point3(p_x, p_y, p_z));
// Step 3: GTSAM初始化
if (!gtsam_initialized_)
{
SLAM_INFO("gtsam is not initialize. ");
ResetGTSAM(); // 重置GTSAM优化器
TrimOldImuData(time_point_cloud_); // 清理旧数据
prev_pose_ = prev_state_.pose(); // 获取当前位姿
// 添加位姿先验因子
gtsam::PriorFactor<gtsam::Pose3> priorPose(X(0), prev_pose_, prior_pose_noise_);
graph_factors_.add(priorPose);
// 添加速度先验因子
prev_vel_ = prev_state_.velocity();
gtsam::PriorFactor<gtsam::Vector3> priorVel(V(0), prev_vel_, prior_vel_noise_);
graph_factors_.add(priorVel);
// 添加偏置先验因子
gtsam::PriorFactor<gtsam::imuBias::ConstantBias> priorBias(B(0), prev_bias_, prior_bias_noise_);
graph_factors_.add(priorBias);
// 插入初始值
graph_values_.insert(X(0), prev_pose_);
graph_values_.insert(V(0), prev_vel_);
graph_values_.insert(B(0), prev_bias_);
// 进行一次优化
optimizer_.update(graph_factors_, graph_values_);
graph_factors_.resize(0); // 清空因子
graph_values_.clear(); // 清空值
// 重置IMU积分器
imu_integrator_opt_->resetIntegrationAndSetBias(prev_bias_);
key_ = 1; // 关键帧ID从1开始
gtsam_initialized_ = true; // 标记已初始化
return;
}
// Step 4: 检查是否需要重置优化窗口
// 当关键帧数量达到子图的数据数量时,重置优化器
if (key_ == m_options_.submaps_options().num_range_data())
{
SLAM_INFO("key_ == m_options_.submaps_options().num_range_data(), Reset graph. ");
// 获取当前状态的协方差作为新的噪声模型
gtsam::noiseModel::Gaussian::shared_ptr updatedPoseNoise =
gtsam::noiseModel::Gaussian::Covariance(
optimizer_.marginalCovariance(X(key_-1)));
gtsam::noiseModel::Gaussian::shared_ptr updatedVelNoise =
gtsam::noiseModel::Gaussian::Covariance(
optimizer_.marginalCovariance(V(key_-1)));
gtsam::noiseModel::Gaussian::shared_ptr updatedBiasNoise =
gtsam::noiseModel::Gaussian::Covariance(
optimizer_.marginalCovariance(B(key_-1)));
// 重置图
ResetGTSAM();
// 使用新的噪声模型添加先验因子
gtsam::PriorFactor<gtsam::Pose3> priorPose(
X(0), prev_pose_, updatedPoseNoise);
graph_factors_.add(priorPose);
gtsam::PriorFactor<gtsam::Vector3> priorVel(
V(0), prev_vel_, updatedVelNoise);
graph_factors_.add(priorVel);
gtsam::PriorFactor<gtsam::imuBias::ConstantBias> priorBias(
B(0), prev_bias_, updatedBiasNoise);
graph_factors_.add(priorBias);
// 插入值
graph_values_.insert(X(0), prev_pose_);
graph_values_.insert(V(0), prev_vel_);
graph_values_.insert(B(0), prev_bias_);
// 优化一次
optimizer_.update(graph_factors_, graph_values_);
graph_factors_.resize(0);
graph_values_.clear();
key_ = 1; // 重置关键帧计数
}
// Step 5: 添加IMU因子
const gtsam::PreintegratedImuMeasurements& preint_imu =
dynamic_cast<const gtsam::PreintegratedImuMeasurements&>(*imu_integrator_opt_);
// IMU因子连接前一关键帧和当前关键帧
gtsam::ImuFactor imu_factor(X(key_ - 1), V(key_ - 1), X(key_), V(key_), B(key_ - 1), preint_imu);
graph_factors_.add(imu_factor);
// Step 6: 添加偏置随机游走因子
graph_factors_.add(gtsam::BetweenFactor<gtsam::imuBias::ConstantBias>(
B(key_ - 1), B(key_), gtsam::imuBias::ConstantBias(),
gtsam::noiseModel::Diagonal::Sigmas(
sqrt(imu_integrator_opt_->deltaTij()) * noise_model_between_bias_)));
// Step 7: 添加激光雷达位姿因子
gtsam::Pose3 curPose = lidarPose;
gtsam::PriorFactor<gtsam::Pose3> pose_factor(X(key_), curPose,
degenerate ? correction_noise_2_ : correction_noise_);
graph_factors_.add(pose_factor);
// Step 8: 插入预测的状态作为初始值
gtsam::NavState propState_ = imu_integrator_opt_->predict(prev_state_, prev_bias_);
graph_values_.insert(X(key_), propState_.pose());
graph_values_.insert(V(key_), propState_.v());
graph_values_.insert(B(key_), prev_bias_);
// Step 9: 执行优化
optimizer_.update(graph_factors_, graph_values_);
optimizer_.update(); // 再次更新
graph_factors_.resize(0); // 清空因子
graph_values_.clear(); // 清空值
// Step 10: 提取优化结果
gtsam::Values result = optimizer_.calculateEstimate();
prev_pose_ = result.at<gtsam::Pose3>(X(key_));
prev_vel_ = result.at<gtsam::Vector3>(V(key_));
prev_state_ = gtsam::NavState(prev_pose_, prev_vel_);
prev_bias_ = result.at<gtsam::imuBias::ConstantBias>(B(key_));
// Step 11: 重置IMU积分器,使用新的偏置
imu_integrator_opt_->resetIntegrationAndSetBias(prev_bias_);
// 清理旧的IMU数据
TrimOldImuData(time_point_cloud_);
// Step 12: 故障检测
if (FailureDetection(prev_vel_, prev_bias_))
{
ResetParams(); // 检测到故障,重置参数
return;
}
// Step 13: 更新关键帧计数
++key_;
done_first_opt_ = true; // 标记已完成第一次优化
}
IMU数据处理函数详解
void TightTrajectoryBuilder2D::AddImuData(const sensor::ImuData &imu_data) {
// 如果未初始化,保存数据用于初始化
if (!imu_initialized_)
{
init_imu_buffer_opt_.push_back(imu_data);
}
// 如果已初始化且积分器有效,进行预积分
if (imu_initialized_ && imu_integrator_opt_)
{
// 计算时间差
double imu_time = common::ToSecondsStamp(imu_data.time);
double dt = (last_imu_time_opt_ < 0) ?
(1.0 / 200.0) : (imu_time - last_imu_time_opt_); // 默认200Hz
last_imu_time_opt_ = imu_time;
// 积分IMU测量值
imu_integrator_opt_->integrateMeasurement(
gtsam::Vector3(imu_data.linear_acceleration.x(),
imu_data.linear_acceleration.y(),
imu_data.linear_acceleration.z()),
gtsam::Vector3(imu_data.angular_velocity.x(),
imu_data.angular_velocity.y(),
imu_data.angular_velocity.z()), dt);
// 预测当前状态
gtsam::NavState current_state =
imu_integrator_opt_->predict(prev_state_, prev_bias_);
// 存储预测状态,用于后续点云处理
predicted_states_.push_back({imu_data.time, current_state});
}
}
故障检测函数详解
bool TightTrajectoryBuilder2D::FailureDetection(const gtsam::Vector3 &velCur,
const gtsam::imuBias::ConstantBias &biasCur) {
// 检查速度是否过大
Eigen::Vector3f vel(velCur.x(), velCur.y(), velCur.z());
if (vel.norm() > 30){ // 速度超过30m/s认为异常
SLAM_WARN("Large velocity, reset IMU-preintegration!");
return true;
}
// 检查偏置是否过大
Eigen::Vector3f ba(biasCur.accelerometer().x(),
biasCur.accelerometer().y(), biasCur.accelerometer().z());
Eigen::Vector3f bg(biasCur.gyroscope().x(),
biasCur.gyroscope().y(), biasCur.gyroscope().z());
// 加速度偏置超过1m/s² 或 角速度偏置超过1rad/s 认为异常
if (ba.norm() > 1.0 || bg.norm() > 1.0){
SLAM_WARN("Large bias, reset IMU-preintegration!");
return true;
}
return false; // 正常
}
总结
- 优点:
- 紧耦合设计:相比原版 Cartographer 简单的 PoseExtrapolator,这种基于 GTSAM 的设计能更好地处理剧烈运动,因为 IMU 被更严谨地建模了(包括 Bias 的在线估计)。
- 鲁棒性:包含 FailureDetection,当速度或 Bias 异常时会重置,防止系统发散。
- 滑动窗口:通过重置图并传递协方差,保证了计算资源的恒定消耗。
- 注意点:
- “伪”紧耦合:严格意义上,这段代码是 松耦合(Loose Coupling) 的变体。因为它将 Ceres 匹配的结果直接作为观测值放入因子图,而不是将雷达的点云残差直接放入因子图。真正的紧耦合通常指 Point-to-Plane 因子直接进入因子图优化。但这种 “Scan Matching Pose + IMU Factor” 的方式在工程上非常有效且稳定。
- 边缘化处理:代码中的 ResetGTSAM 是一种简化的边缘化策略,可能会丢失部分信息,但在 2D 建图中通常足够。