- Github源码
- 本博文复现过程采用的代码及代码注释(如有):My github repository
理论解读
采用几何聚类+运动估计结合的点云分割方法,不依赖GPU(仅占用约半个CPU物理核),能区分快速动态与静态目标,实现动态物体跟踪及速度估计。
算法架构如下图所示:
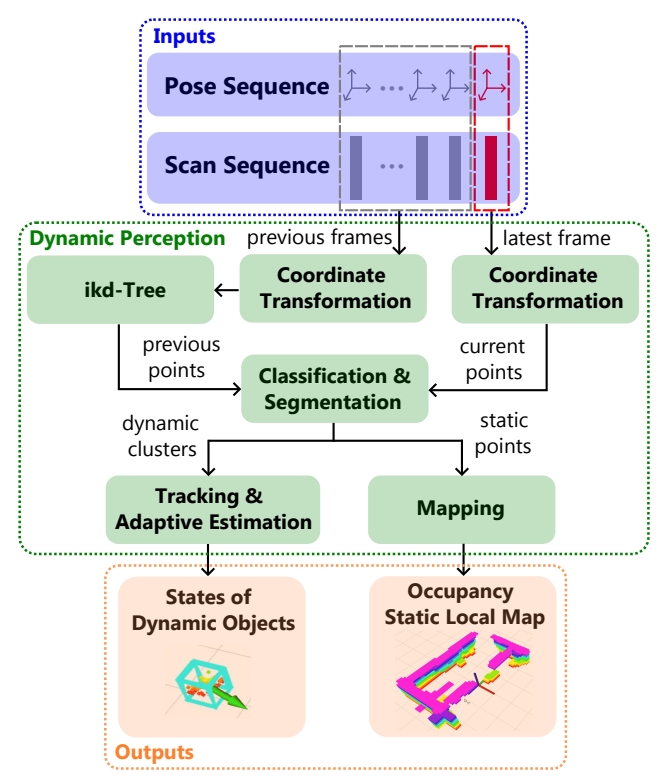
- 把点云从传感器局部坐标系B变换到全局坐标系W(因此,需要pose的输入)
- 建立一个增量 KD 树(I-KD Tree)来维护最近 F 帧的点集合 $\xi$,点集合通过增删操作动态更新
- $\xi \in {WP_{j}}$, 其中 $j \in [k-F, k-1]$, $k$ 为当前时刻(第$k$帧)
- 为什么是最近F帧?目的是实现点的“均匀分布”。如果历史点云过密(比如一个静止墙在原地被重复扫描 100 次),则 KD 树查询的距离几乎为 0,会掩盖其他动态物体;如果过稀,则动态检测不稳定。【保存多帧可以让“静态结构”在时间上积累密度,而“动态物体”会因为移动而形成稀疏或拖尾现象。】
- KD Tree 是一种空间索引结构,用来快速做最近邻搜索(即给定 $p$点,快速在$\xi$中找到最近的点)
- I-KD Tree增量式 KD 树,当新的帧点云到来时,不是重新建树,而是“增量更新”已有的 KD 树,把新点插入,保留了“历史点云的结构信息”,可以用来判断一个点是不是新出现的、或者物体是否在移动。
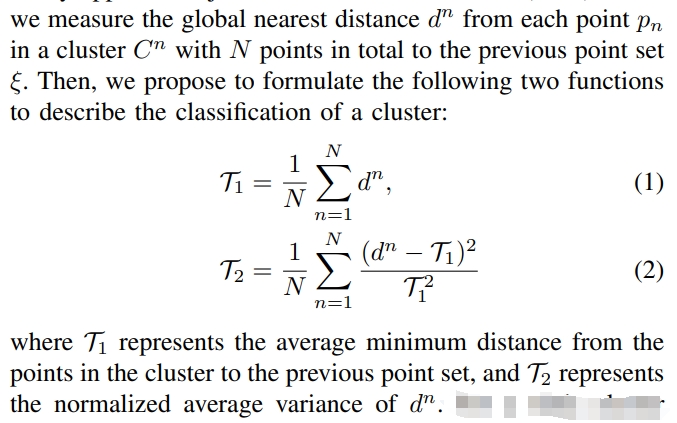
- 采用点云聚类(DBSCAN)区分动态/静态/未知点云.如下面公式所示,分别算出 $T_{1}$ (该簇点到历史点云 $\xi$ 的平均最小距离) 和 $T_{2}$ (衡量离散度的归一化方差)
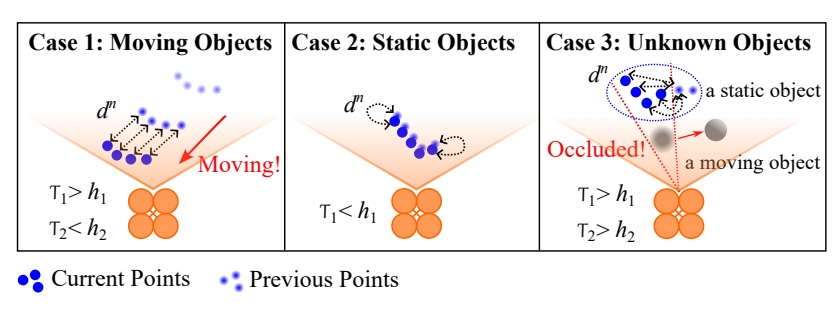
- 动态物体:$T_{1} > h_{1}, T_{2} < h_{2}$ :若一个簇是真正移动的物体,其当前点到历史点云的最近距离 $T_{1}$ 较大,并且由于它自己在每一帧上移动的投影相对一致,所以 $T_{2}$ 小。
- 静态物体:$T_{1} < h_{1}$ : 若一个簇曾在历史帧中出现且未移动,其点到历史点云的最近距离应在传感器测量误差范围内。
- 未知物体:$T_{1} < h_{1}, T_{2} < h_{2}$ :若是新出现或被遮挡的静态物体(刚从遮挡区显现或新进入视野),它的点到历史点的距离会不均匀(有些点可能很近,有些点很远),因此 $T_{2}$ 大。
- 动态目标跟踪:用离散线性系统与卡尔曼滤波器(KF)估计,如果某簇是新出现的,则新建一个 KF,若某簇能与已有第 i 个 tracker 关联,则把该簇的几何中心与帧差(中心的位移)作为测量向量 $Z_{i}$ 进入 KF 更新。
- 当有多个检测(D 个障碍物)和多个 tracker(I 个跟踪目标),通过匈牙利算法(Hungarian Algorithm)寻找最优匹配组合。
- 静态局部地图输出:其实就是把动态点集从当前点去删除。
此外,论文还有自适应估计(预测、路径规划)方面的理论推导,这部分就不展开了。
实验复现
安装配置
sudo apt install python3-catkin-tools python3-osrf-pycommon
git clone git@github.com:R-C-Group/-Fast-and-Adaptive-Perception-and-Planning.git
cd FAPP
catkin build
# source ~/catkin_ws/FAPP/devel/setup.bash
安装tmux
# install tmux
sudo apt install tmux
sudo apt install tmuxp
# kill a session (for example)
tmux kill-session -t fapp
运行demo
tmuxp load quick_start.yaml
运行后则可以加载环境,并且环境中有移动物体/静态物体,通过设置3D Nav Goal可以实现导航及规划,同时也实时估算运动物体的速度。

实时性测试效果如下:5个物体,点云聚类耗时1.2ms,跟踪耗时1.8ms。

内存消耗情况如下:
- 处理器是11th Gen Intel(R) Core(TM) i7-11800H @ 2.30GHz (2.30 GHz),机带RAM为32.0 GB
- 【CPU占用情况】
- rviz (56.0% CPU): 占用了大约半个核心。
- mapping_node (52.3% CPU): 建图节点。占用半个核心也属于正常范围。
- fapp_planner_no (11.0% CPU): 路径规划节点。占用较低,运行稳定。
- 【内存占用情况】
- 系统识别到的总内存约为 16GB。
- mapping_node 383.8 MiB,fapp_planner 144.6 MiB

- 通过Antigravity打开项目(选择打开文件):
\\wsl$\Ubuntu-20.04\home\kwanwaipang\catkin_ws\FAPP\src
- 添加livox_ros_driver2:
- 此前需要安装SDK
# 安装SDK
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
# 安装驱动
# ./build.sh ROS1 #这个脚本不仅会编译,还会将 package.xml 和 CMakeLists.txt 重定向/重写为符合 ROS 1 标准的文件。
cd /home/kwanwaipang/catkin_ws/FAPP/src/livox_ros_driver2
# 确保使用的是 ROS1 的包描述文件
cp -f package_ROS1.xml package.xml
cd /home/kwanwaipang/catkin_ws/FAPP/
# 重新初始化并编译(指定参数)
catkin build livox_ros_driver2 -DROS_EDITION=ROS1
# 然后重新执行,编译全部
# 2. 编译整个工作空间,并确保 ROS_EDITION 参数一直有效
catkin config --append-args -DROS_EDITION=ROS1
catkin build
真机测试
此处选择录制rosbag,注意对应的topic情况如下:

source devel/setup.bash
# roslaunch so3_quadrotor_simulator simulator_example.launch
roslaunch mot_mapping bag_mapping.launch
