本博文对业内主流机器人上下肢运动控制方案进行调研。 上下肢分开控制/全身控制,强化学习/传统运动/VLA。
主流的机器人公司有:智元机器人、银河通用、星动纪元、埃斯顿、宇树科技、优必选、特斯拉 Optimus、Figure AI、Apptronik、Agility Robotics、小鹏IRON、小米 CyberOne、广汽 GoMate、奇瑞 Mornine、乐聚机器人、逐际动力、 智平方、自变量机器人等。
本博文仅供本人学习记录用~
引言
本博文从以下维度进行切入。
- 控制架构:上下肢独立控制、全身协同控制、分层控制策略
- 算法范式:传统控制方法(PID、力控、MPC、WBC)、强化学习(DRL)、VLA大模型
- 应用与实现:工业机器人、外骨骼、四足机器人、人形机器人、自动驾驶
控制架构
上下肢分开控制 (Decoupled Control)
- 特点:上下肢视为独立系统,分别设计控制器。通常下肢负责移动与平衡(如步行、奔跑),上肢负责操作与交互(如抓取、放置)。
- 优势:设计相对简单,稳定性分析更易进行。
- 挑战:难以实现复杂的全身协同任务,可能缺乏能量效率最优。
- 典型应用:工业机械臂(上肢)、步行助力外骨骼(下肢)。
全身协同控制 (Whole-Body Control, WBC)
- 特点:将机器人视为一个多刚体系统,统一优化所有关节的控制输入,以完成全局任务目标(如同时行走和抬手拿东西)。
- 优势:能实现更复杂、拟人的行为,理论上的性能更优。
- 挑战:计算复杂,模型精度要求高,实时性挑战大。
- 典型应用:人形机器人(如特斯拉Optimus、小米CyberOne)
主流机器人公司运动方案概览
- 注意,此处大部分都是“宣称”
| 机器人型号/公司 | 控制模式 | 核心算法/架构 | 补充说明 |
|---|---|---|---|
| 智元机器人(远征) | 下肢:结合Model-based与Learning-based方式优化行走稳定性和自然度 上肢:不明 |
强化学习 | “预研”基于自然语言指令集驱动的AgentOS,适配不同的机器人本体,并通过强化学习实现机器人技能的精准编排与高效执行 |
| 智元机器人(灵犀) | 下肢:强化学习 上肢:不明 |
强化学习 | 训练代码 推理代码 |
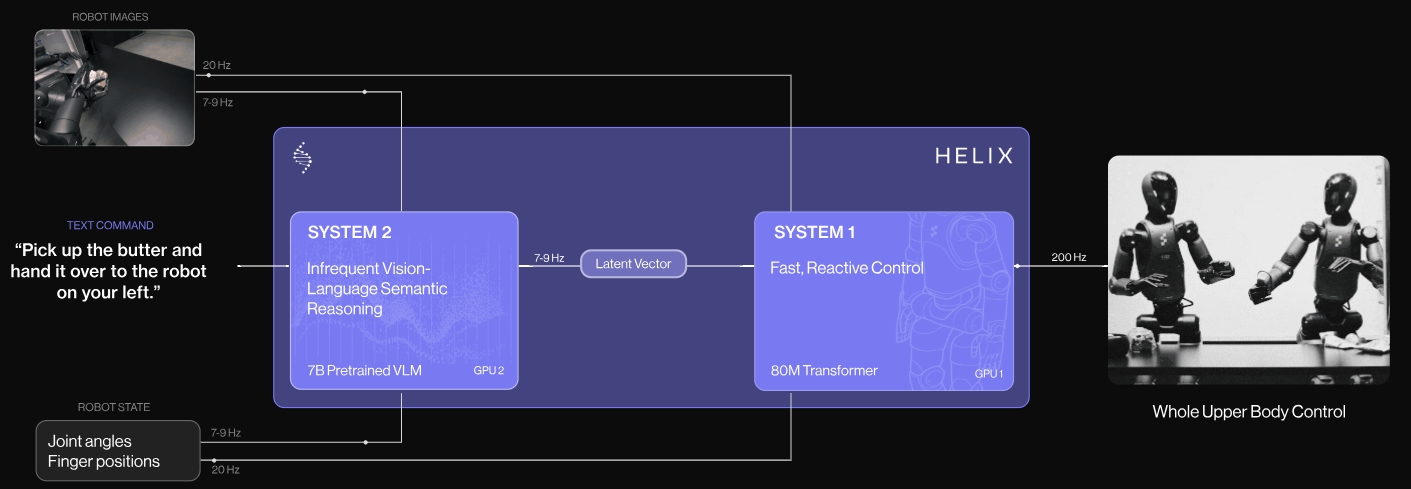
| Figure AI | 上肢控制 | VLA | 通用VLA模型端到端控制、语言指令理解后生成动作 Figure AI发布Helix |
| 银河通用(Galbot) | 下肢:可折叠腿部+轮式底盘 上肢:端到端VLA |
VLA+VLN | 端到端视觉输入输出末端执行器抓取;端到端导航大模型 |
| 星动纪元(星动L7) | 运动控制:端到端强化学习实现运动平衡 | 全身控制 | 端到端 VLA 大模型 ERA-42实现观看操作视频直接学技能 |
| 宇树科技(H1) | — | 强化学习 | — |
| 优必选(Walker X) | 下肢:实时步态规划,基于ZMP(零力矩点) 等传统控制算法保障稳定性 上肢:视觉伺服,手眼协调,能完成一些交互任务 |
传统控制 | 21年左右的产品,下肢是传统控制,上肢为遥操作,人手动作映射到机器人动作Walker X产品说明 |
| 特斯拉 Optimus | 下肢:基于学习的方法(模仿学习、强化学习),强调整体运动柔顺性与效率 上肢:基于学习的方法,致力于实现精细操作(如精准抓取) |
导航部分与FSD融合 | 特斯拉虽然提及了Optimus 在运动控制上采用了仿生人体低频率运动的设计理念,但并未披露更细节的设计方案,但鉴于特斯拉在端到端自动驾驶的成就,大几率也是端到端的 |
| 逐际动力 | — | 强化学习 | TRON 1仅支持足式;LIMXOli为通用人形;从开源的文档来看主要是科研级 |
| 1X Technologies(NEO Gamma) | 行走:强化学习+WBC 视觉操作模型实现拾取操作 语言大模型实现语音交互及肢体互动 |
全身控制 | 拥有柔软纺织物皮肤以及流畅的人机交互及行走姿态,通过强化学习和对海量人体动作数据的训练,NEO Gamma能够以100Hz的频率模拟人类自然行走、摆动手臂,甚至蹲下捡拾物品。 |
智元机器人
远征A2:
- 下肢控制主要特点:结合了Model-based与Learning-based两种算法,进一步提升了机器人的运动控制与适应能力。
- 上肢控制主要特点: 7自由度双臂,内置六维力传感器;19自由度灵巧手(12个主动关节),具备视觉和触觉感知,能执行拧螺丝、穿针等精细操作
预研了基于自然语言指令集驱动的AgentOS,这一创新技术可以适配不同的机器人本体,并通过强化学习实现机器人技能的精准编排与高效执行。这部分应该是类似VLA,但是只是处于预研阶段
灵犀X1:
- 官方明确其软件系统采用了强化学习(Reinforcement Learning) 方法进行运动控制(例如行走),并提供了相应的训练和推理代码。这证实了其下肢控制采用了数据驱动的思路。
- 其上肢采用了串并联混合构型手臂和差分驱动双肩关节设计,但开源资料中并未详细说明其上肢操作是否以及如何与高级大模型(如VLA)结合。
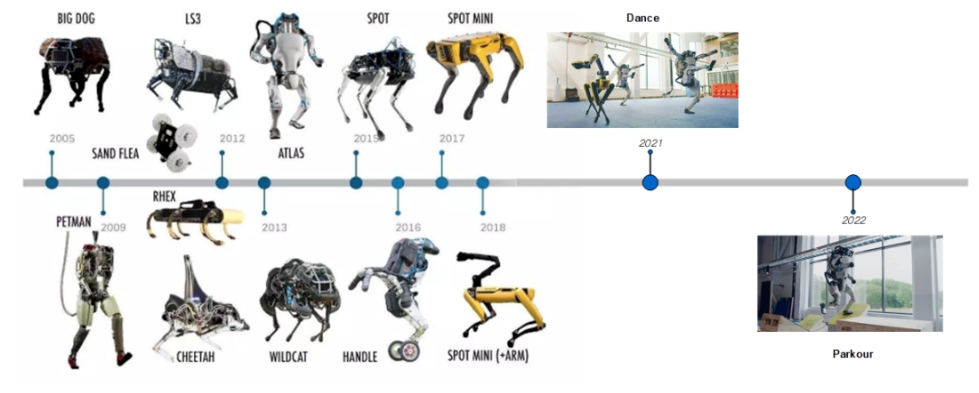
波士顿动力足机器人
波士顿动力应该都是最早的了,当时用的还是传统控制等。
银河通用
银河通用(Galbot):
- 下肢控制特点:采用“可折叠腿部+轮式底盘” 结构,注重稳定性与升降能力,以适应零售等场景的实地应用
- 强调手眼脑协调,依靠视觉反馈闭环自主完成商品抓取和打包
核心算法架构是端到端VLA大模型(如GraspVLA),合成数据驱动+多模态大模型。2025年初,银河通用以10亿级合成大数据,端到端训练了一个VLA大模型,以视觉作为输入,模型实时输出当前机器人末端执行器应当如何移动,是一个闭环反馈模型,能够实现对不同场景中移动物体的抓取。6月,又推出了端到端导航大模型,使机器人能够拥有“听—看—懂—走”闭环运动能力
星动纪元
星动纪元(星动L7):
- 下肢:端到端强化学习算法控制55个自由度,实现高动态动作(如360°旋转跳)和实时平衡
- 上肢:十轴手腕,全直驱五指灵巧手(12个主动自由度),7轴仿生机械臂,协同负重20kg,并能使用工具
算法的核心是:端到端VLA大模型ERA-42,支持通过观看人类视频学习技能。从其运动上来看应该属于全身控制。
通过端到端强化学习破解「运动平衡」: 55 个自由度与端到端强化学习算法构建「超灵活 +自适应」控制体系:全身 55 个自由度形成协同网络,通过算法实现毫秒级关节联动——旋转跳时,腰部调整躯干角度、手臂摆动抵消离心力、腿部精准控制落地位置,多维度姿态修正确保重心稳定;端到端强化学习基于运动数据训练,建立「传感器数据 -关节动作」直接映射:无需人工设计平衡规则,动态调整 55 个关节的输出力度与角度,在 360°旋转跳、街舞 Breaking 等高动态动作中,通过持续与环境交互优化动作策略,实现「失衡即修正」的实时平衡姿态控制。

Figure AI
2025年2月,Figure AI发布Helix通用具身智能模型(VLA模型)。Helix可以在人形机器人上协同运行,使得两台机器人可以协作解决一个共享的、长期的操作任务。在发布会演示的视频中,Figure AI的机器人在摆放水果的操作中展现出流畅的协作模式:左边的机器人把果盆拉过来,右边的机器人顺手把水果放进去,然后左边的机器人再把果盆放回原位。
2025年10月,Figure 03 发布。个人总结其亮点主要有以下:
- 每只手嵌入掌部广角摄像头,即使主视野被遮挡也能维持实时视觉反馈。
- 自研触觉传感器,灵敏度可检测3克压力,实现对滑动、脆弱物体的精细控制。采用柔顺、可自适应指尖,接触面积更大、握持更稳定;
- 机体覆盖多密度泡棉 + 柔性织物外壳;以确保安全性
- VLA——Helix 系统:Figure 03 配备了全新设计的感知组件与手部系统,专为 Figure 的专有视觉-语言-动作 AI「Helix」打造。
特斯拉Optimus
- 环境感知与记忆:第二代的Optimus 集成的感知与定位传感器(包括摄像头、IMU 等)与特斯拉FSD 视觉神经网络深度融合,实现了实时环境建图与路径记忆。视频中机器人在室外行走时,能自主识别障碍物并规划避障路径,同时通过视觉特征点匹配技术完成环境记忆,二次行走时可直接调用历史路径数据。

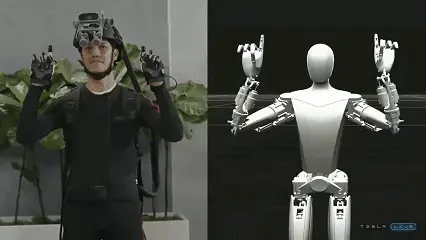
- 动作捕捉与技能迁移:第二代的Optimus 通过多模态动作捕捉与端到端神经网络的无缝协同,实现了人类技能的快速迁移:工程人员佩戴 VR 头显与动作捕捉服进行操作,其动作序列被多传感器系统实时采集,经基于 Transformer 的端到端模型解析后,直接生成机器人关节控制参数。
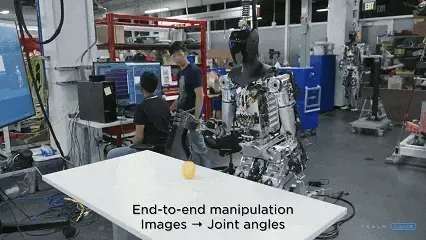
- 端到端操作:在端到端操作中,系统仅需视觉输入即可完成复杂任务 —— 例如通过摄像头识别物体后,直接输出关节角度指令驱动灵巧手完成抓取,全程无需预设代码
- 身体平衡控制:视频中Optimus 不仅能稳定完成单脚平衡动作,还能做出瑜伽级的肢体拉伸姿态,展现出远超以往的身体控制精度与动作协调性。这一进展标志着特斯拉在机器人多关节协同控制、重心动态调整等核心领域实现了重大突破。这个应该是实现了全身控制的。

开普勒
开普勒发布了全球首款商业可售的混动架构人形机器人K2“大黄蜂”,正式启动量产进程。 以24.8万元的售价打破了人形机器人“百万级原型机”的价格壁垒,更凭借“滚柱丝杠直线执行器混动架构”等核心技术,在步态自然度、环境适应性、工业实用性等维度比肩国际顶尖水平。
- 下肢:采用“强化学习+模仿学习”组合策略,结合GPU加速仿真训练与真机数据打磨,搭配“奖励函数引导”机制,不断优化步态控制,缩小仿真与现实的适配误差,这一思路与特斯拉Optimus的技术方向相通。
- 上肢:分层模型VLA+语义识别。该系统依托“仿真训练+真机数据”双轮驱动,还融入了混动架构研发中积累的仿真与真机数据经验,让机器人具备“听懂指令、自主决策”的能力。目前,K2“大黄蜂”已能精准识别自然语言指令,完成深度推理与规划,并借助基于扩散变换器(DiT)的动作模块,快速生成动作指令,实现毫秒级响应。
|
|
逐际动力 (TRON 1)
- 下肢:模块化足端(双点足、双足、双轮足),支持多形态算法研发,开箱即用,内置高性能运控算法。
- 上肢:主要关注下肢移动能力,上肢操作能力信息未突出
其他
机器人“大小脑”
机器人“大小脑”融合是指机器人感知、决策系统(大脑)与运动控制系统(小脑)的协同工作架构,旨在模拟人类神经系统中高级认知(大脑)与运动协调(小脑)的分工协作机制,通过软硬件协同实现“感知-决策-执行”闭环。融合后的系统能够增强长程操作任务的能力。
- 大脑:负责感知、规划、决策、交互与学习等功能,具体包含处理海量的多模态感官信息(如视觉、力觉、语言),理解任务目标,进行复杂的逻辑推理和长期行为规划,此过程伴随着与环境自然交互并持续学习,这一部分主要依赖于强大的AI算法和计算能力。
- 小脑:负责运动控制、协调、反馈调节以及稳定性,即接收来自大脑的决策指令并转化为具体的动作指令,并以极高的频率和精度控制电机关节,确保动作的平滑、稳定和安全,这一部分对确定性和低延迟有极高的要求。
主流的足式机器人控制方法
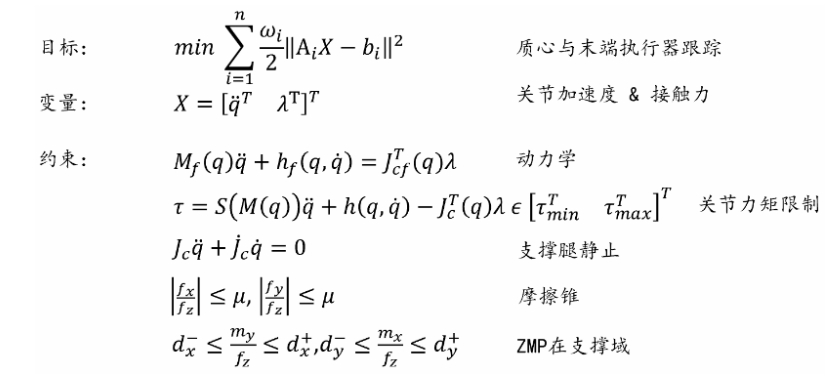
现在主流的足式机器人控制方法一般是双层结构,基于模型预观控制(MPC)的上层轨迹规划和基于动力学模型的下层全身关节力控(WBC)。
全身关节力控基于机器人完整的刚体动力学模型,将各个关节力矩的分配表达成一个优化问题:如下图,优化目标是减小质心和末端执行器轨迹的跟踪误差等用户需求,优化变量是关节的加速度和足底的接触力,约束包括符合动力学模型,满足关节力矩限制,符合支撑腿足底不动等物理假设,足底力满足摩擦锥要求以及ZMP(基于简化模型的零力矩点)在支撑域内保证脚掌不翻转等要求。优化得到的关节加速度和足底接触力再通过逆动力学就可以得到各个关节期望的前馈力矩。
参考资料
- VLA应用研究:VLA成为无人驾驶、AI机器人和无人工厂的技术基石
- (智元机器人)稚晖君人形机器人全家桶发布
- 数据:99%+1%,能实现“从0到10000”——银河通用王鹤:让机器人甩掉遥控器,“睁开眼”干活
- 性能比肩特斯拉 Optimus,清华系具身智能企业星动纪元发布星动 L7
- 2021~2025:特斯拉人形机器人Optimus发展进程详解
- 具身智能创业项目信息汇总
- 干货丨浅谈足式机器人的运动控制
- 领先特斯拉Optimus,全球首款商业可售的混动架构人形机器人正式启动量产!
-
[Figure 03 发布 面向家庭和生产的系统性重构与优化,自研触觉传感器,计划四年生产十万台](https://mp.weixin.qq.com/s/WF-1SP6eE1-fdgS2nBk9FQ)