对于大多数激光雷达而言,尽管激光的发射和接收速度很快,但构成点云的每个点并非在同一时刻生成。 例如,我们将100ms内(对应于10HZ频率)累积的数据作为一个点云帧输出。 如果在这100毫秒内,激光雷达本体或安装激光雷达的载具的绝对位置发生变化,则该帧点云中每个点的坐标系都将不同(如下右图所示)。 直观地说,这一帧点云数据将会“畸变/distorted”,无法真实反映所探测到的环境信息。 这就像拍照时,如果手抖,照片就会模糊一样。这就是激光雷达的自运动畸变。
雷达运动畸变的本质就是对于一帧点云,其不同的点的坐标系是不一样的。如下左图所示,点P1~P3是LiDAR扫到的三个点,它们在世界坐标系下是共线的。此时,假如雷达剧烈的运动(如下中图所示),最终获得的点将不在共线(如下右图所示)
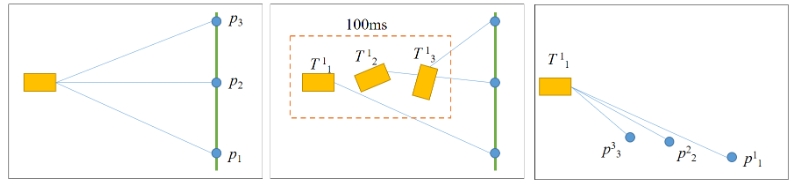
那么一般如何做运动补偿呢?
设$p^1_i$为雷达第一个点$p_i$的坐标系, $T^j_i$ 表示从i到j的位置变化。而对于一帧点云而言,每个点到第一个点的坐标变换为: $T^1_2$ , $T^1_3$ , $T^1_4$ 等等。因此,每个点都可以转换到第一个点对应的坐标系:
$p^1_i=T^1_i \cdot p^i_i$
实际上,一般都是通过测量LiDAR的运动信息,然后通过线性插值获得 $T^{1}_{i}$ 。 其中,由于IMU可以提供高频运动,因此可以很好的被用作帧间点云的去失真。利用IMU做点云去失真有几种做法:
- 仅仅对角度进行补偿,如LIO-SAM,并且这类工作都是假设在scan获取的过程速度是恒定的。
- 除了IMU以外,还需要基于已有的传感器的pose以及速度进行运动补偿。
- LOAM基于估算的sensor pose,再采用与IMU松融合,并且假设帧间运动速度是不变的。
- 比如Fast-LIO则是back-propagation technique(用已校正的IMU来去除运动失真).
- 对于这部分的工作,去失真的精度依赖于上一步定位精度(
the undistortion accuracy is tied to the accuracy of the previous scan-matching steps)。因此会存在accumulating integration error over time
- 基于连续时间的运动校正
此外,看到一个Github Issue表述如下:
对于IMU的数据频率确实频率可以很高,但是IMU无法完成位移的矫正。相反,odom在50Hz的工作频率下可以完成位移和旋转矫正,而且效果还不错。
不过有以下两点:
1.旋转的畸变对算法影响较大,某些情况下可以优先校准旋转的畸变;2.不是所有机器人的里程计对于畸变校准都是可用的(比如频率低甚至没有的情况也是有的)。有可用的里程计数据当然是好的,条件允许的话甚至还可以用轮式里程计和imu融合后的数据。没有条件的话使用imu去除旋转畸变可能是最优,也是更通用的选择。
对LiDAR的运动补偿除了可以进行去失真以外还可以进行动态物体检测,下面介绍一些经典的工作
Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter
Fast-LIO提出了反向传播的方法来进行点云的运动去失真a formal back-propagation process to compensate for the motion distortion
它并不是直接用于点云的去畸变,而是其优化框架中的一个关键组成部分,通过联合优化IMU测量和LiDAR点云来估计传感器在连续时间内的运动状态,从而间接实现点云的去畸变。

“反向传播”的思想体现在每次迭代中,系统会计算损失函数(例如点到面距离误差)相对于状态变量(包括位姿、速度、IMU偏差等)的梯度,并沿着负梯度方向更新这些状态变量。这种梯度下降或高斯牛顿法等优化算法的迭代更新过程,类似于神经网络中的反向传播,旨在找到最优的传感器轨迹和去畸变后的点云。每次状态更新都会导致点云在全局坐标系中的位置发生调整,从而有效地去除运动畸变。
Real-Time Truly-Coupled Lidar-Inertial Motion Correction and Spatiotemporal Dynamic Object Detection
本文的重点是map-free dynamic object detection based on lidar,通过连续IMU的预积分(continuous preintegrated measurements )来实现lidar的去失真。
而去失真包含了点-线与点-面残差的最小距离计算,这个几何信息结合时间可以进一步计算每个点法向量,进而推导出每个点的速度,而根据点的速度可以用作动态物体识别。
此外,大多数的点云运动去失真都是作为预处理来做的,是依赖于上一步scan-matching的精度,并不是真正意义上的tightly-couple,而本文则是真正做到紧融合。
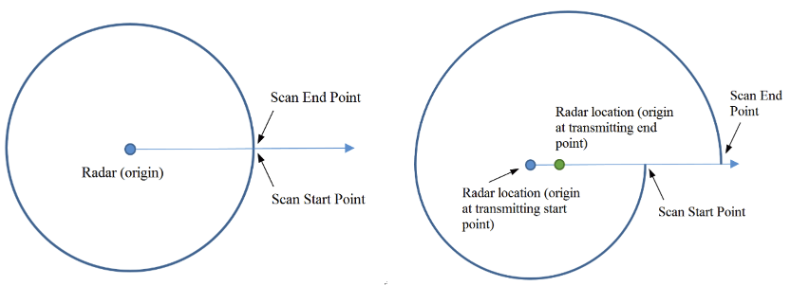
Direct LiDAR-Inertial Odometry: Lightweight LIO with Continuous-Time Motion Correction
- ICRA2023 PDF DLIO这篇工作则是通过恢复continuous-time trajectories
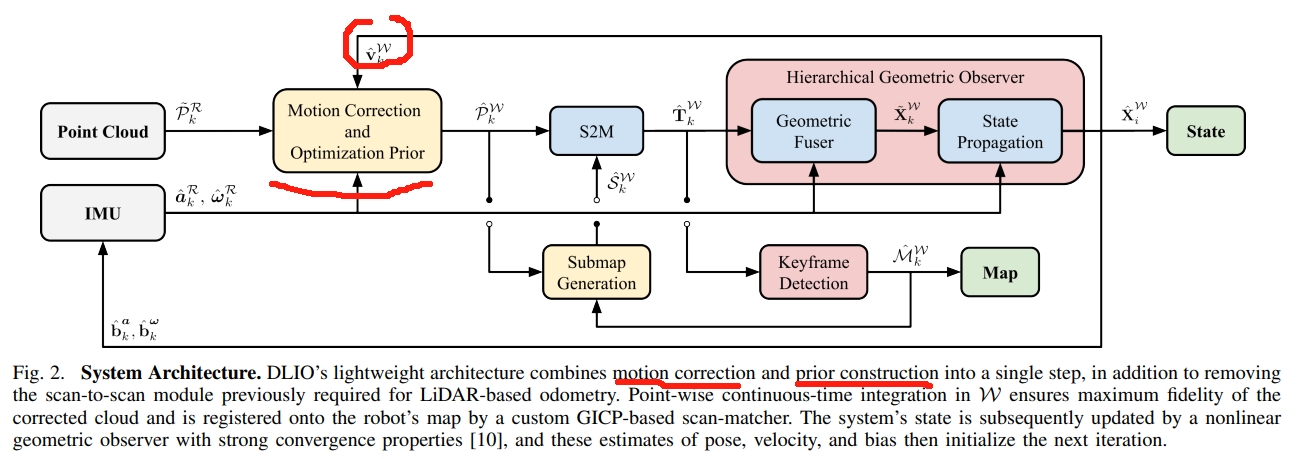
首先通过IMU测量的数值积分计算一组离散的姿态,随后通过分析的连续时间方程建立测量样本之间的平滑轨迹,以查询每个唯一的每点去偏变换。
参考资料
- Catkin package that provides lidar motion undistortion based on an external 6DoF pose estimation input, from ETHZ ASL
- livox_cloud_undistortion
- 利用IMU数据对2D激光雷达数据进行运动畸变校正(仅限于旋转校正):2d_lidar_undistortion
- Livox Open Source Sharing: About LiDAR Distortion Removal