引言
ICRA2025的Best Conference Paper Award开源了,对其进行测试,写下本博文作为学习记录用~
- paper
- website
- code
- 本博文复现过程采用的代码及代码注释(如有):My github repository
理论学习
MAC-VO的核心在于其提出的Metrics-aware Covariance。利用学习到的度量感知匹配不确定性来执行两个主要任务:选择关键点和在姿态图优化中加权残差(也就是对于检测出的关键点的空间协方差的建模)。
此外,MAC-VO除了定位以外也可以增量式构建map。其主体框架包括:
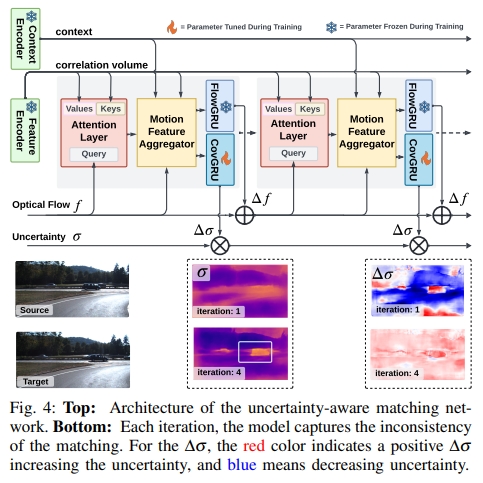
- uncertainty-aware matching network,实现双目特征的匹配以及对于Metrics-aware uncertainty进行建模
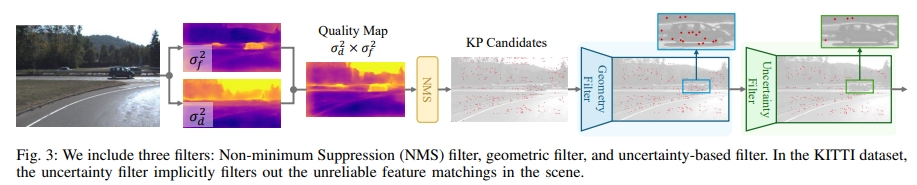
- Uncertainty Aware Keypoint Selector。进行鲁棒的特征点选择,其包括了三个模块来逐步选择鲁棒的特征点。
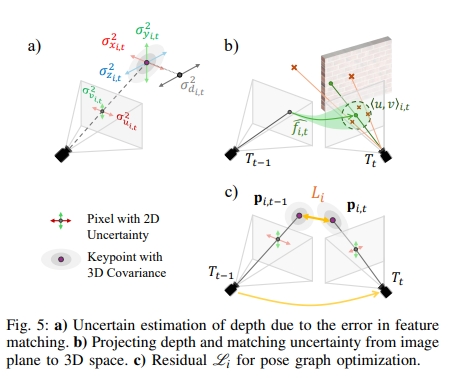
- Metrics Aware Spatial Covariance。对于每个特征点所估算出来的光流以及不确定的深度,会投影到3D空间。而这个过程将会保留了尺度信息,因此可以获得针对每个特征点的Metrics Aware 3D协方差。而针对双目匹配可能带来的误差,作者对这个uncertainty进行建模获得其协方差
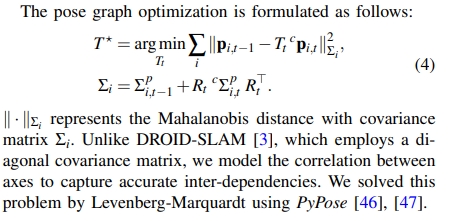
直观的理解就是,首先因为是双目,因此是宣称Metrics-aware ,其次,通过网络来进行双目的特征匹配及光流计算。并且通过三个filter的设计来对特征点进行选择(比如说:DPVO中patch是random sample的,此处则为有针对性的选择)。最后再进行Pose Graph 优化(也就是重投影误差或者叫BA)。而求解的过程用时PyPose
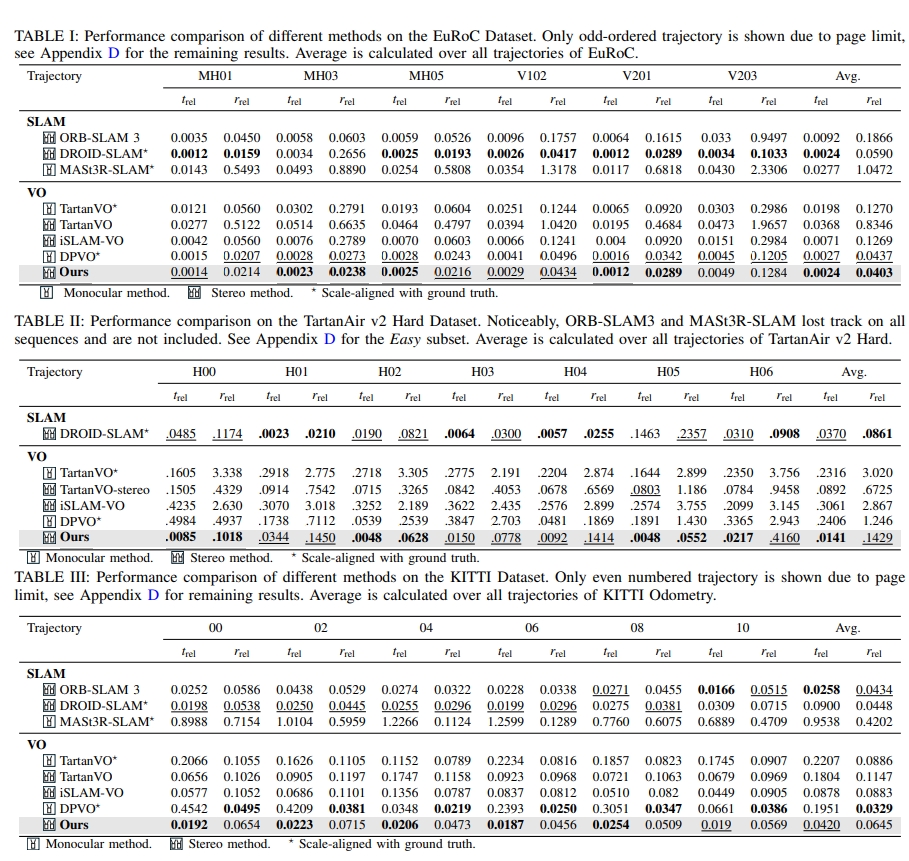
而从论文的实验结果看,跟DPVO,ORB-SLAM3, DROID-SLAM,MASt3R-SLAM这些SOTA比都有所提升:
实验测试
配置过程
git clone https://github.com/R-C-Group/MAC-VO.git --recursive
# rm -rf .git
conda create -n macvo python=3.10.11
conda activate macvo
# conda remove --name macvo --all
pip install -r requirements.txt
- 下载模型
$ mkdir Model
$ wget -O Model/MACVO_FrontendCov.pth https://github.com/MAC-VO/MAC-VO/releases/download/model/MACVO_FrontendCov.pth
$ wget -O Model/MACVO_posenet.pkl https://github.com/MAC-VO/MAC-VO/releases/download/model/MACVO_posenet.pkl
- 下载数据
pip install gdown
gdown https://drive.google.com/uc?id=标识符
mkdir Dataset
gdown https://drive.google.com/uc?id=1kCTNMW2EnV42eH8g2STJHcVWEbVKbh_r
然后修改Config/Experiment/MACVO/MACVO_example.yaml中的数据路径Data: !include ../../Sequence/TartanAir_example.yaml也就是对应的root
然后运行代码如下:
python3 MACVO.py --odom Config/Experiment/MACVO/MACVO_example.yaml --data Config/Sequence/TartanAir_example.yaml

实验效果
- 接下来进行可视化以及验证结果
# 验证精度
python -m Evaluation.EvalSeq --spaces SPACE_0, [SPACE, ...]
python -m Evaluation.EvalSeq --spaces Results/MACVO@abf001/05_30_121311
# 画轨迹
python -m Evaluation.PlotSeq --spaces SPACE_0, [SPACE, ...]
python -m Evaluation.PlotSeq --spaces Results/MACVO@abf001/05_30_121311

 Combined_ROEcdf
Combined_ROEcdf
|
 Combined_RTEcdf
Combined_RTEcdf
|





- 而对于mapping module,其不会执行pose的优化,因此需要先获取tracking后再运行mapping部分
python MACVO.py --odom ./Config/Experiment/MACVO/MACVO_mapping.yaml --data ./Config/Sequence/TartanAir_example.yaml
# --data ./Config/Sequence/TartanAir_abandonfac_001.yaml
#将其中的gtFlow设置为false,由于作者提供的sample数据并没有光流
#注意,需要对./Config/Experiment/MACVO/MACVO_mapping.yaml中的motion > args 放置pose文件路径
运行完mapping后效果如下:

接下来进行可视化。3D可视化采用的为the Rerun,包括了相机姿态、点云以及轨迹。
- 采用MobaXterm
- 作者github中给出的可视化似乎不可用,改为用下面命令可以边运行边可视化,但是对该插件不太熟悉,就没录视频了~
conda activate macvo
python MACVO.py --odom ./Config/Experiment/MACVO/MACVO_mapping.yaml --data ./Config/Sequence/TartanAir_example.yaml --useRR

在Thor上的配置情况
git clone https://github.com/R-C-Group/MAC-VO.git --recursive
# rm -rf .git
conda create -n macvo python=3.10.11
conda activate macvo
# conda remove --name macvo --all
pip3 install torch torchvision --index-url https://download.pytorch.org/whl/cu130
pip install -r requirements.txt
pip install xformers
# pip install xformers==0.0.27.post2 --no-build-isolation
- 代码的运行需要依赖Hugging Face 官方服务器下载预训练权重。如果没有代理,可以尝试使用 HF-Mirror 镜像站:
export HF_ENDPOINT=https://hf-mirror.com
python3 MACVO.py --odom Config/Experiment/MACVO/MACVO_example.yaml --data Config/Sequence/TartanAir_example.yaml
性能分析:
- 安装工具
pip install nvitop
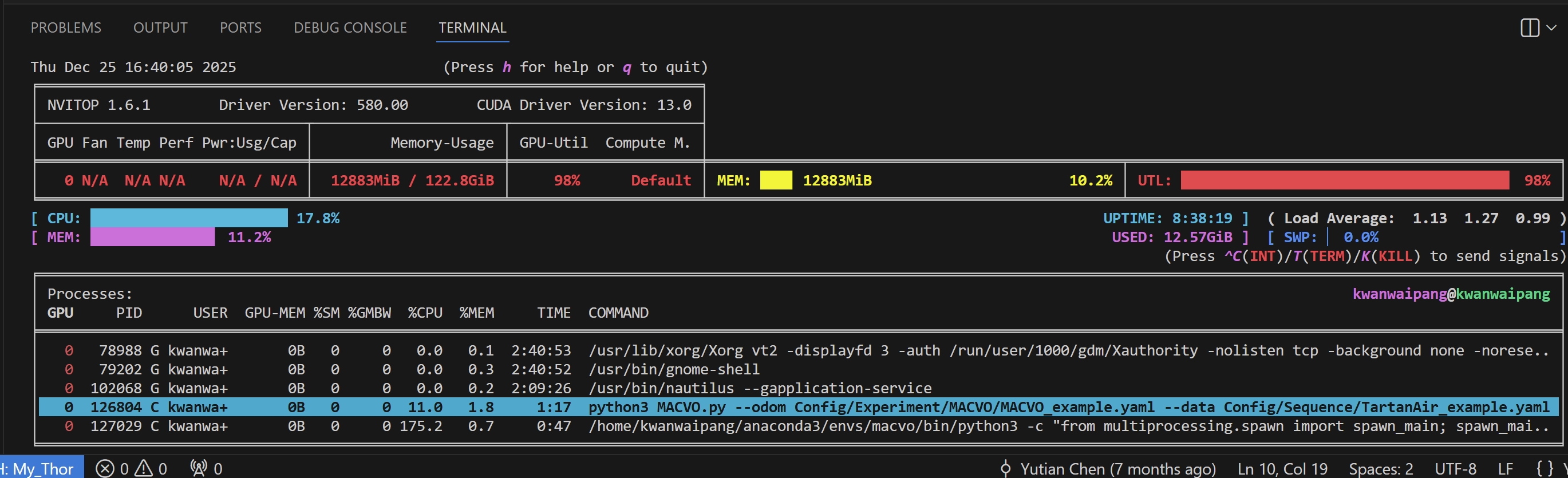
- GPU 显存占用 (Memory-Usage): 12.57 GiB / 122.8 GiB (约 10.2%)
- %SM (11.0):虽然GPU总利用率是 98%,但 SM 的实际“内部饱满度”只有 11%。
- %GMBW (0):显存带宽利用率为 0。
- 整机 CPU 利用率: 17.8%(占用约两个物理核)。