引言
DUSt3R具有非常强大的性能,但是还是针对静态场景的。而在ICLR2025上新出的Motion DUSt3R (MonST3R)则是从动态场景中直接估计每个时间下的几何信息。进而实现对动态场景的建模~
为此,写下本博文记录阅读及测试过程,本博文仅供本人学习记录用~
相关的资料:
- paper
- Github
- 本博客采用的代码及注释(如有)均在Github Link
- Survey for Transformer-based SLAM:Paper List and Blog
- 博客:What is Transformer? Form NLP to CV
理论解读
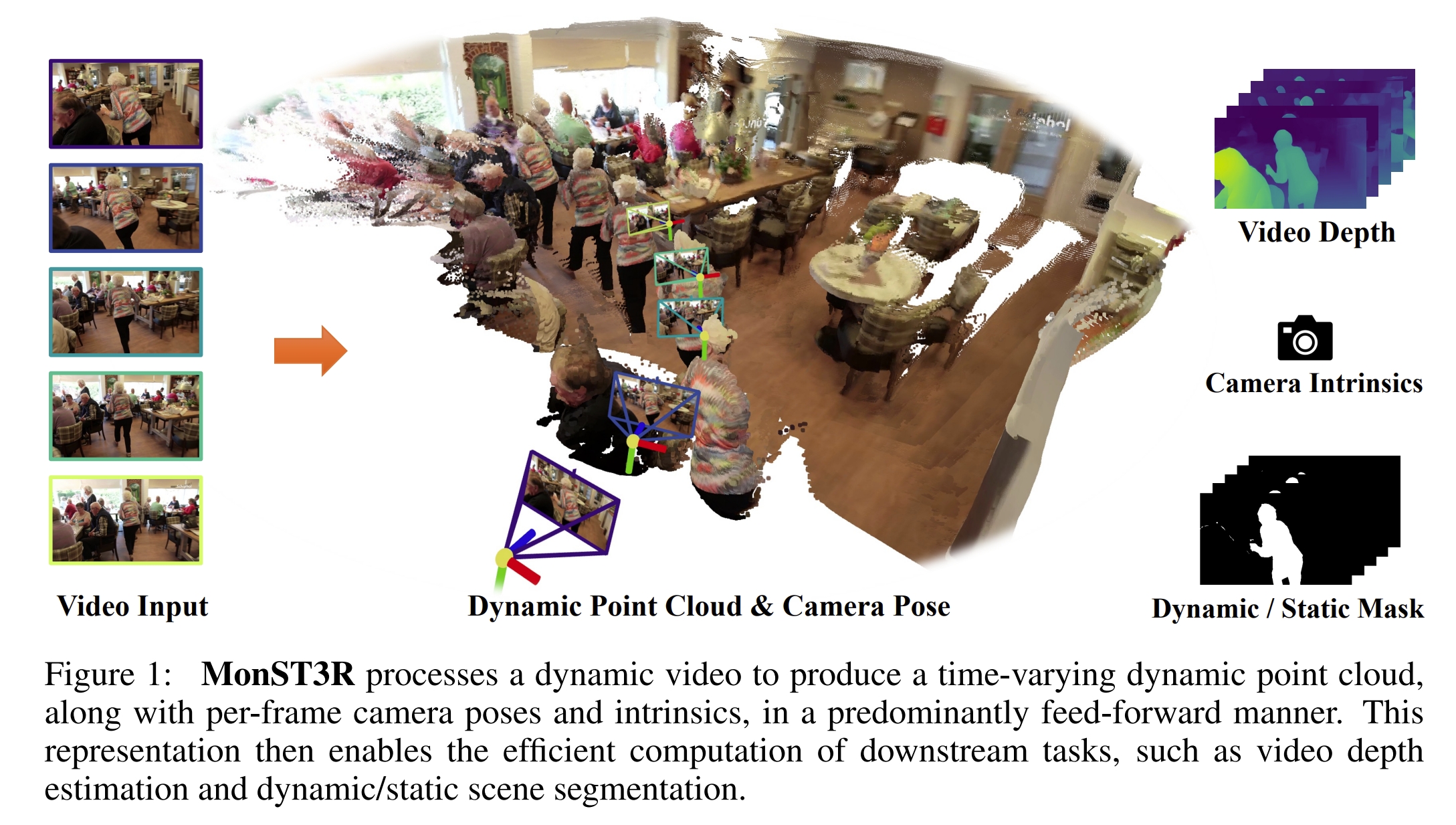
本文关键的insight则是将每个timestep下的pointmap估算出来(这样可以直接用DUSt3R的框架),进而实现动态场景的建模。 但是由于动态场景的数据并不好获取,因此,作者采用的是 fine-tuning 的形式,那么原始DUSt3R的网络权重也可以复用。 此外,动态场景也并不多,但是作者还是找到了几个small-scale的数据集可以让网络finetune一下即可使用。
如下图所示,本文所指的从dynamic场景中估算的pointmap,则是根据物体的移动把动态物体的点云也在上面显示出来。而静态部分的场景则需要实现Multi-frame alignment~
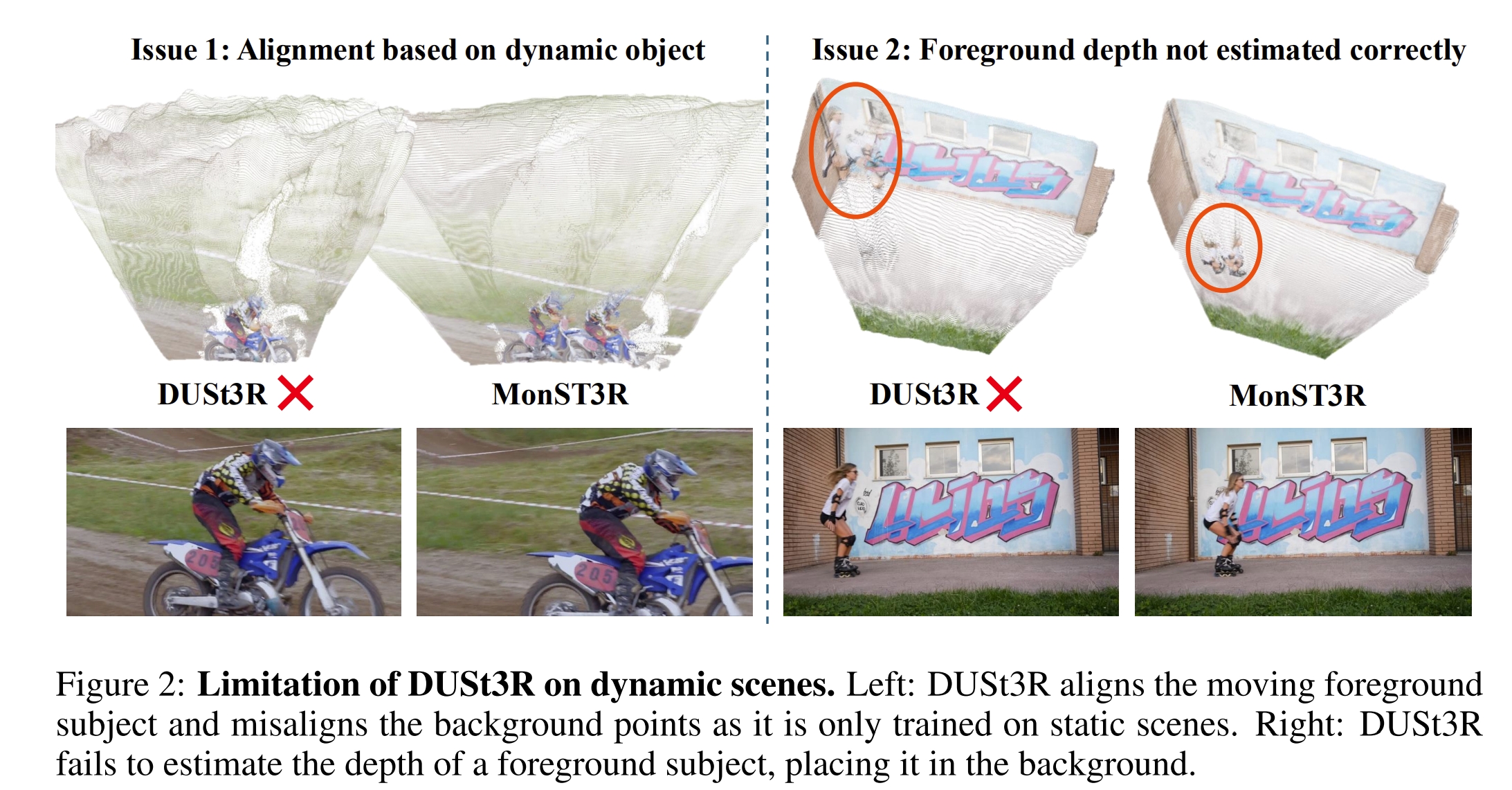
下图则是展示了MonST3R与DUSt3R在动态场景下的对比效果。可以看到首先由于训练数据中缺乏动态场景,因此DUSt3R是没有办法align运动物体的pointmap的。同时由于运动物体的存在也会影响到静态背景的align。当然作者在论文也提到,这一缺陷是因为数据domain 的mismatch,所以在实际MonST3R中还是需要对DUSt3R的权重进行fine-tune
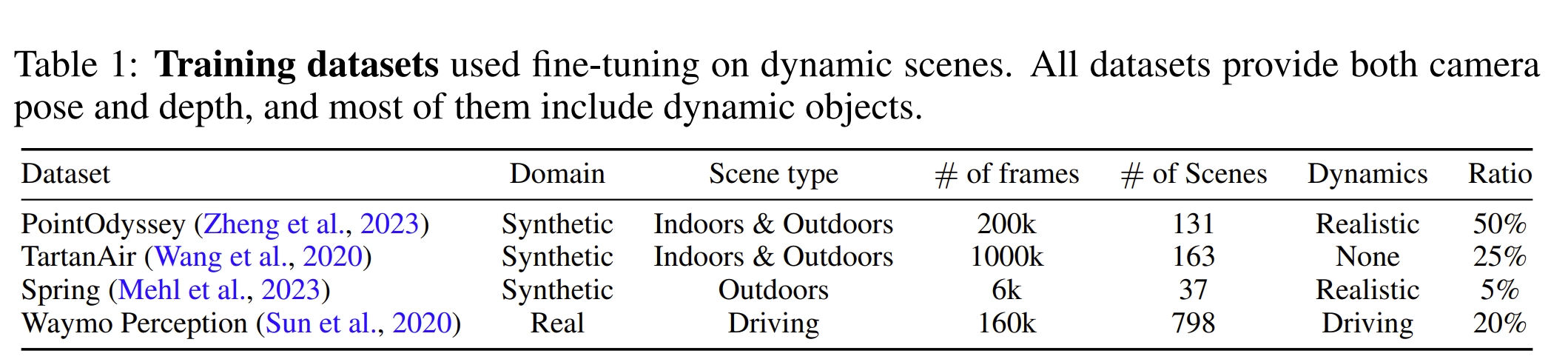
采用的模型的结构跟DUSt3R是一样的。主要不一样的点只是对于每个pointmap,MonST3R都是refer to时间的一个点。而采用的带有动态物体的数据集则是如下四个:
对于finetune过程中,首先只finetune perediction head以及decoder,而网络的encoder是固定不变的。
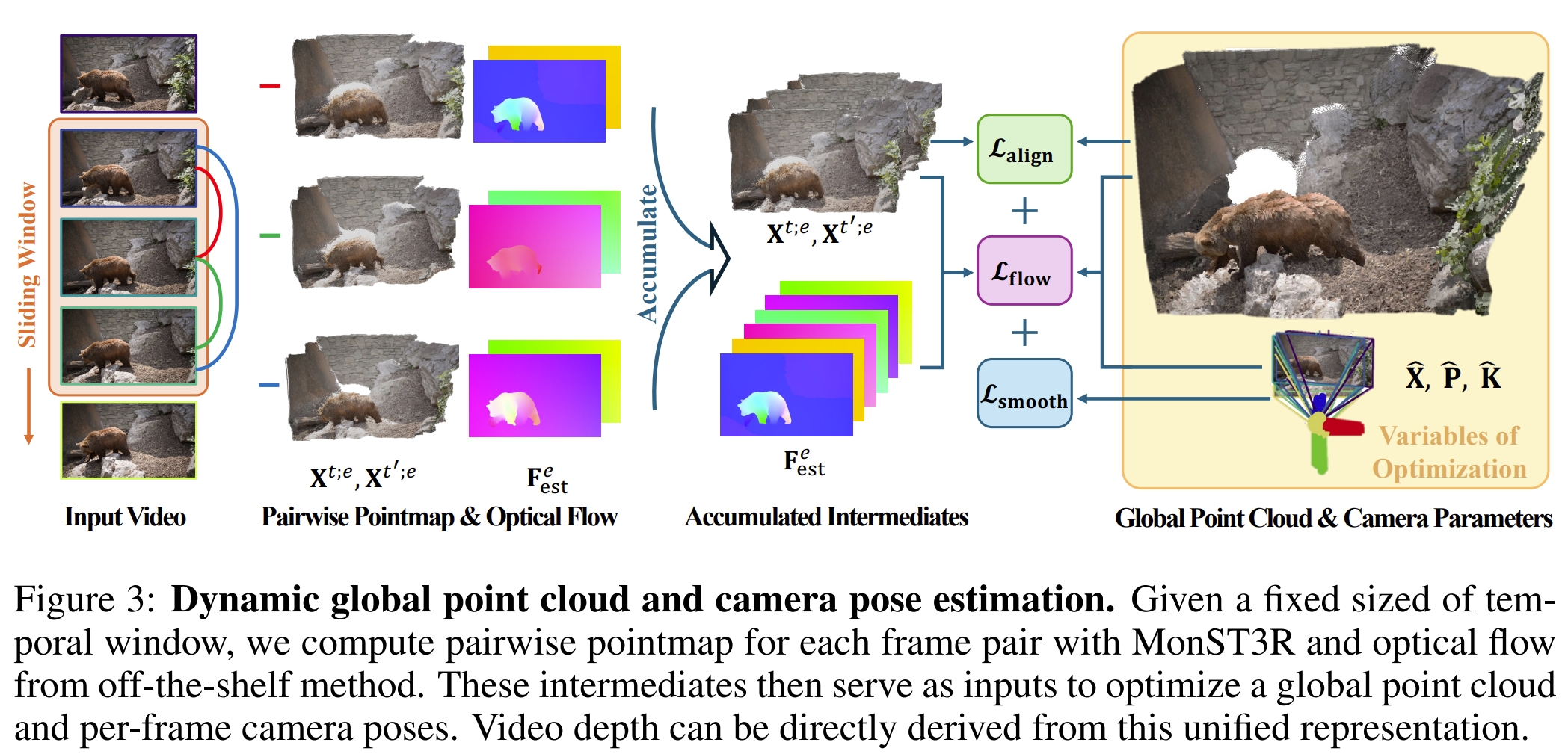
此外,额外加了模块来估算光流(off-the-shelf method)。从代码来看,光流用的是RAFT,此外还需要用Segment Anything(SAM 2: Segment Anything in Images and Videos),这一系列的操作可以很好的把动态与静态物体分离出来。而对于多个视角下的全局优化都是采用DUSt3R的全局alignment的模块来做的,只是分别构建三个loss(针对光流、相机姿态的平衡、以及全局对齐)进而实现动态场景下全局pointmap的构建。
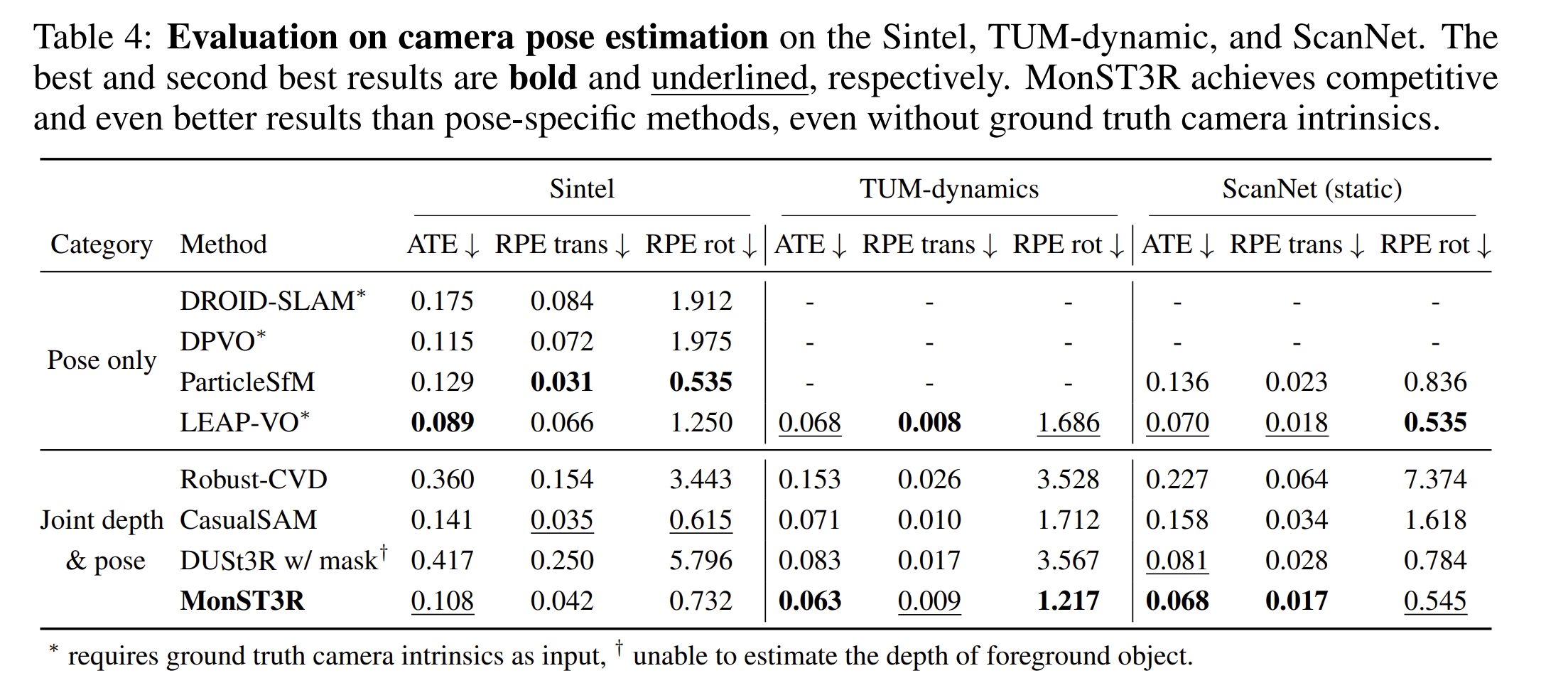
作者用TUM-dymanic数据集来进行测试。可以看到,通过采用运动物体的GT mask,可以将DUSt3R处理数据的运动物体部分给mask掉,但这会导致位姿估计的退化(这应该是由于黑色的区域跟原本DUSt3R的数据分布不一样导致的~)。
实验测试
配置测试
首先安装一系列的依赖项
git clone --recursive https://github.com/KwanWaiPang/monst3r.git
# rm -rf .git
conda create -n monst3r python=3.11 cmake=3.14.0
conda activate monst3r
# conda remove --name monst3r --all
#A100用的就是CUDA12.2,应该是可以兼容的
pip install torch==2.5.0 torchvision==0.20.0 torchaudio==2.5.0 --index-url https://download.pytorch.org/whl/cu121
# conda install pytorch torchvision pytorch-cuda=12.1 -c pytorch -c nvidia # use the correct version of cuda for your system
pip install -r requirements.txt
# 额外单独安装
# pip install -e third_party/sam2
cd /home/gwp/monst3r/third_party/sam2
# 清理之前的构建缓存
rm -rf build/ dist/ *.egg-info/
python setup.py build_ext --inplace
python setup.py install --user
# 可视化相关依赖,
pip install -r requirements_optional.txt
# 额外单独安装
pip install waymo-open-dataset-tf-2-12-0 --no-deps
然后安装4d的可视化工具
pip install -e viser
安装RoPE 的cuda kernal
# DUST3R relies on RoPE positional embeddings for which you can compile some cuda kernels for faster runtime.
cd croco/models/curope/
python setup.py build_ext --inplace
cd ../../../
然后下载MonST3R,光流及语义三个模型的权重
# pip install gdown
# gdown https://drive.google.com/uc?id=标识符
# conda activate monst3r
# gdown https://drive.google.com/uc?id=1Z1jO_JmfZj0z3bgMvCwqfUhyZ1bIbc9E
# download the weights
cd data
bash download_ckpt.sh
cd ..
下载数据集
cd data; python download_davis.py; cd ..
不过项目本身给了lady-running数据,下面先以其为例
python demo.py # launch GUI, input can be a folder or a video
# use memory efficient optimization: --not_batchify
# 用MobaXterm 来可视化
conda activate monst3r
CUDA_VISIBLE_DEVICES=3 python demo.py --input demo_data/lady-running --output_dir demo_tmp --seq_name lady-running
# use video as input: --input demo_data/lady-running.mp4 --num_frames 65
# (update 12/15) use memory efficient optimization: --not_batchify
# (update 1/20) use real-time mode: --real_time
- 结果会存放在demo_tmp路径下。
The results will be saved in the demo_tmp/{Sequence Name} (by default is demo_tmp/NULL) folder for future visualization. - 推理的结果似乎很久,并且很容易out of memory
输入序列
估算出来的深度结果如下图所示

可视化4D结果,在vscode下运行即可打开浏览器~
python viser/visualizer_monst3r.py --data demo_tmp/lady-running
# to remove the floaters of foreground: --init_conf --fg_conf_thre 1.0 (thre can be adjusted)
# 下面是实时可视化(但是似乎运行不成功,难道是实测的时候用的?)
# (update 1/20) for results generated by real-time mode, please (update viser and) using the following command:
python viser/visualizer_monst3r_realtime.py --data-path demo_tmp/lady-running
接下来验证其他序列看看效果
CUDA_VISIBLE_DEVICES=3 python demo.py --input data/davis_videos/breakdance.mp4 --output_dir demo_tmp --seq_name breakdance
python viser/visualizer_monst3r.py --data demo_tmp/breakdance
CUDA_VISIBLE_DEVICES=3 python demo.py --input data/davis_videos/judo.mp4 --output_dir demo_tmp --seq_name breakdance
python viser/visualizer_monst3r.py --data demo_tmp/judo
 breakdance
breakdance
|
 judo
judo
|
|
|
|
可能用了Segment Anything 的缘故,可以看到右侧建出的pointmap对于背景站着的人也比较明显的分割开来了,虽然他们并没有移动,但是比起其他静态物体明显不一样~