之前开发一直上基于ROS的,而针对ROS也写过大量的技术博客My CSDN Blog(从学习、debug再到论文复现等等)。
后来,ROS2也发布了,但是由于两个平台的代码不太兼容,为此实验室SLAM团队一直还是使用ROS1,直到最近才慢慢有部分代码是支持ROS2的,为此,本博文在对ROS2做初步了解的同时,再针对ROS/ROS2存在的一些问题进行分析。
本博文仅供本人学习记录用~
ROS1与ROS2的区别
ROS1 是2007年诞生的,在活跃的开源社区的支持下,功能不断丰富,代码数量不断庞大,但是其整体设计其实并不太科学,缺乏安全性、实时性、鲁棒性并不太符合工业和具体的行业应用。但是ROS1已经积重难返,一些重要涉及底层的修改,会使ROS1更加不稳定,而且会不可避免遇到大量ROS1 包代码兼容性问题。 与其缝缝补补,不如重新创建一个更加科学稳定的ROS2。而目前ROS1 的Noetic 将于2025年停止支持,
系统架构
- ROS1:采用中心化架构,依赖roscore或Master节点管理所有节点通信。Master一旦崩溃,整个系统瘫痪。
- ROS2:采用分布式架构,基于DDS(Data Distribution Service) 实现节点自发现通信,无单点故障风险,更适合多机器人协同和工业环境
通信机制
- ROS1:基于TCP/UDP协议(TCPROS/UDPROS),存在延迟高、丢包率高、无加密机制的问题,且服务调用为同步阻塞模式(客户端需等待响应)。
- ROS2:
- 通过DDS支持多种QoS策略(如实时性、可靠性配置),适应弱网络环境。
- 服务调用改为异步模式,支持零拷贝传输,降低CPU负载。
- 提供端到端加密,满足工业安全需求。
跨平台与实时性
- ROS1:主要支持Linux,实时性差(非实时内核),难用于嵌入式或汽车控制等场景。
- ROS2:支持Linux、Windows、MacOS、RTOS(如VxWorks),甚至无操作系统的微控制器。通过DDS实现软/硬实时控制(如1ms级运动学解算)
下面表格对其进行对比:
| 对比项 | ROS1 | ROS2 |
|---|---|---|
| 架构 | 中心化(依赖Master) | 分布式(DDS自发现) |
| 实时性 | 弱(非实时内核) | 强(支持软/硬实时) |
| 通信协议 | TCP/UDP(无QoS) | DDS(可配置QoS) |
| 平台支持 | 主要Linux | Linux, Windows, MacOS, RTOS, MCU |
| 默认语言 | Python2 + C++03 | Python3 + C++11/14/17 |
| 编译系统 | Catkin | Ament + Colcon |
ROS1代码需重写才能在ROS2运行,主要因API和通信机制重构:
- API差异:如节点初始化、话题订阅、服务定义等接口完全不同(e.g., ros::init() → rclcpp::init())。
- 消息定义:ROS2消息包需添加命名空间(如std_msgs/msg/String vs ROS1的std_msgs/String)。
- 编译系统:CMakeLists.txt和package.xml格式变更(e.g., catkin → ament_cmake)
通过bridge把ros1的消息类似于repub成ros2的格式,进而实现ros1和ros2节点双向通信。
ROS2
ROS2在设计之初,就考虑到要满足各种各样机器人应用的需求。
- 多机器人系统:未来机器人一定不会是独立的个体,机器人和机器人之间也需要通信和协作,ROS2为多机器人系统的应用提供了标准方法和通信机制。
- 跨平台:机器人应用场景不同,使用的控制平台也会有很大差异,比如自动驾驶汽车中的算力性能肯定比AMR机器人强很多,为了让所有机器人都可以运行ROS2,ROS2可以跨平台运行于Linux、Windows、MacOS、RTOS,甚至是没有任何系统的微控制器(MCU)上,这样我们就不用纠结自己的控制器能不能用ROS了。
- 实时性:机器人运动控制和很多行为策略要求机器人具备实时性,比如机器人要可靠得在100ms内发现前方的行人,或者稳定的在1ms周期内完成运动学、动力学的解算,ROS2为类似这样的实时性需求提供了基本保障。
- 网络连接:无论在怎样的网络环境下,ROS2都可以尽量保障机器人大量数据的完整性和安全性,比如在wifi信号不好的时候数据也要尽力发送过去,在有黑客入侵风险的场景下要对数据进行加密解密。
- 产品化:,大量机器人已经走向我们的生活,未来还会越来越多,ROS2不仅可以用于机器人研发阶段,还可以直接搭载在产品中,走向消费市场,这对ROS2的稳定性、强壮性也提除了巨大挑战。
- 项目管理:机器人开发是一个复杂的系统工程,设计、开发、调试、测试、部署等全流程的项目管理工具和机制,也会在ROS2中体现,更方便我们去开发一款机器人。
所以ROS2是一个全新的机器人操作系统,在借鉴ROS1成功经验的基础上,对系统架构和软件代码全部进行了重新设计和实现。与ROS1相比,体现在以下几点:
- 系统架构进行了颠覆性的变化,ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS(discovery——自发现机制,找到彼此,从而建立稳定的通信连接。),为所有节点的通信提供可靠保障。
- 软件API进行了重新设计,ROS1原有的接口已经无法满足需求,ROS2结合C++最新标准和Python3语言特性,设计了更具通用性的API,虽然导致原有ROS1的代码无法直接在ROS2中运行,但是尽量保留了类似的使用方法,同时提供了大量移植的说明。
- 编译系统进行了升级,ROS1中使用的rosbuild和catkin问题诸多,尤其是针对代码较多的大项目以及Python编写的项目,编译、链接经常会出错,ROS2对这些问题也进行了优化,重新优化后的编译系统叫做ament和colcon
其架构对比见下图:
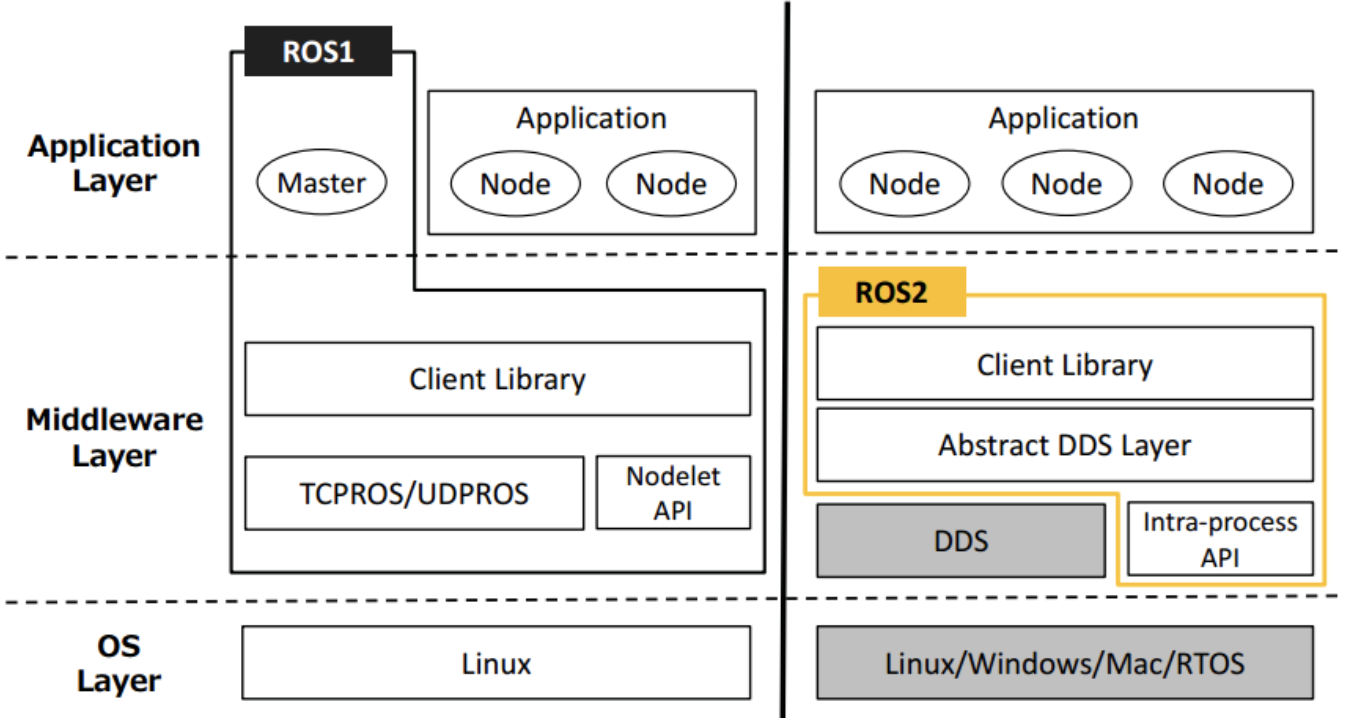
在上图中,左侧是ROS1,右侧是ROS2,两者最明显的变化,那就是Master。(上面第一点已经描述过,此处不在叙述)
中间层是ROS封装好的标准通信接口,写程序的时候,会频繁和这些通信接口打交道,比如发布一个图像的数据,接收一个雷达的信息,客户端库会再调用底层复杂的驱动和通信协议。而在ROS1中,ROS通信依赖底层的TCP和UDP协议,而在ROS2中,通信协议更换成了更加复杂但也更加完善的DDS系统。
最后最大的区别就是可安装的操作系统了,ros1主要在linux上,而ros2可选项较多。
DDS通信
ROS2相比ROS1最大的变化,除了省略了Master之外,应该就是通信系统的变化了。ROS1中基于TCP/UDP的通信系统,频繁诟病于延迟、丢数据、无法加密等问题,ROS2中的DDS在通信层面的功能就丰富多了。
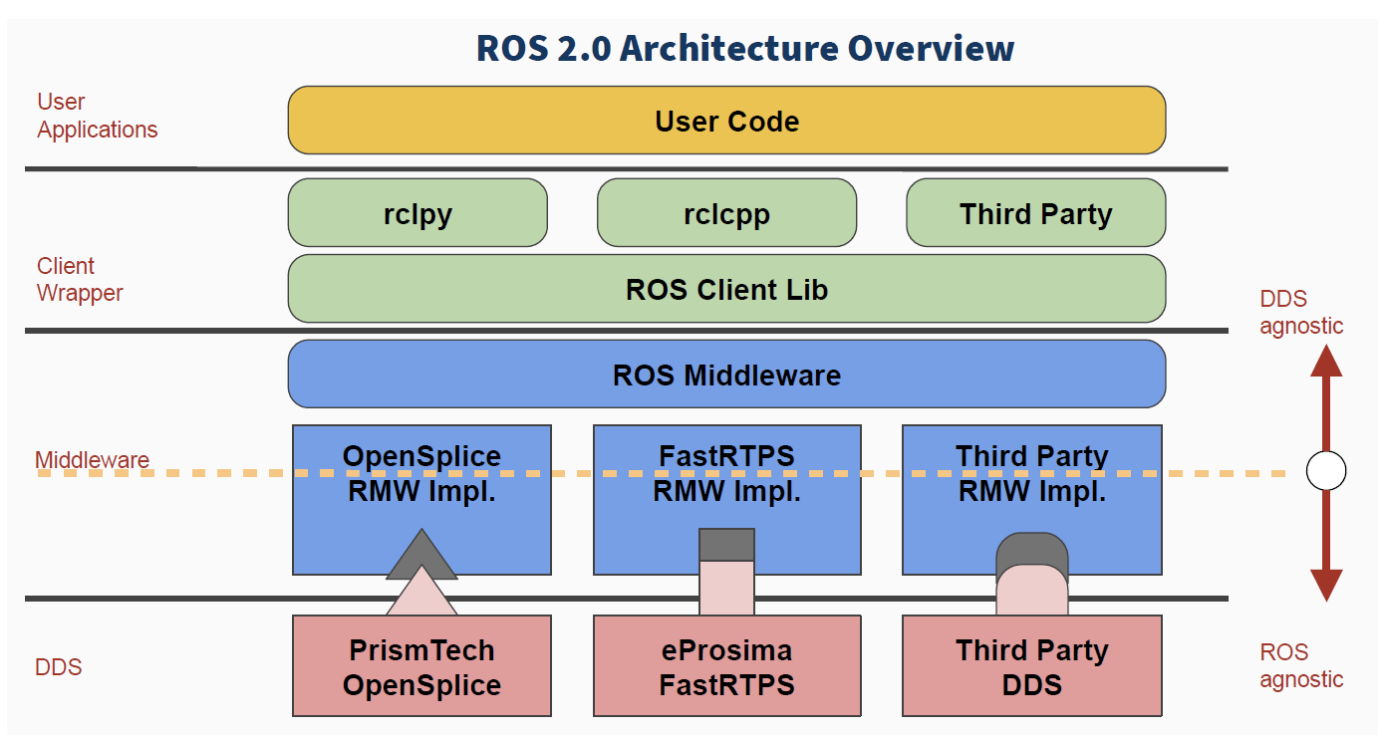
DDS其实是物联网中广泛应用的一种通信协议,类似于我们常听说的5G通信一样,DDS是一个国际标准,能够实现该标准的软件系统并不是唯一的,所以我们可以选择多个厂家提供的DDS系统,比如这里的OpenSplice、FastRTPS,还有更多厂家提供的,每一家的性能不同,适用的场景也不同。
而针对不同DDS厂家的软件接口不一致的情况,ROS2设计了一个ROS Middleware,简称RMW,也就是指定一个标准的接口,比如如何发数据,如何收数据,数据的各种属性如何配置,都定义好了,如果厂家想要接入ROS社区,就得按照这个标准写一个适配的接口,把自家的DDS给移植过来,这样就把问题交给了最熟悉自家DDS的厂商。对于我们这些用户来讲,某一个DDS用的不爽,只要安装另一个,然后做一个简单的配置,程序一行的都不用改,轻松更换底层的通信系统。
举一个例子,比如我们在产品开发时,可以先用开源版本的DDS满足基本需求,部署交付的产品时,再更换为商业版本更稳定的DDS,这样可以减少开发成本。
关于国产自主可控机器人操作系统的几点思考
提升生态兼容性与迁移效率
- 强化ROS生态兼容层
- 痛点:ROS1/ROS2系统虽然支持分布式通信,但缺乏对ROS/ROS2代码的无缝迁移工具,开发者需手动重写节点逻辑。
- 提出想法:
- 开发自动化代码转换工具,支持ROS消息类型、服务调用的一键转换;
- 扩展ros1_bridge功能,支持跨网络通信(现有的当前仅支持同机通信)
- 构建硬件驱动标准化仓库
- 痛点:不同厂商电机、传感器需定制驱动,导致开发碎片化,重复开发率高。
- 提出想法:
- 建立开源硬件驱动库,定义统一接口规范(如运动控制API、传感数据格式);
- 鼓励硬件厂商提交认证驱动,通过测试后纳入官方仓库;
优化实时性与确定性调度
- 微秒级响应的场景化适配
- 痛点:目前ROS1/2在工业场景复杂负载下仍然存在延迟问题,(ROS2宣称支持1000+节点稳定运行,延迟<5ms;ROS1的TCP/IP通信架构在100节点时,延迟会飙升到20毫秒以上)。而在特殊应用中,比如医疗手术中,多台机器人需要同时操作,任何通信延迟都可能导致严重后果。
- 提出想法:
- 引入动态优先级抢占机制,根据任务关键性(如紧急制动>路径规划)实时调整调度策略;
- 开发负载预测模块,提前分配算力资源避免拥塞;
- 采用共享内存直通技术,绕过内核协议栈,将决策到关节控制的延迟压缩至≤10μs;
- 联合国产芯片厂商定制硬件加速指令集;
降低开发成本
- 仿真-部署一体化
- 痛点:ROS仿真工具(如Gazebo)仍依赖国际开源社区,国产替代未成熟。同时仿真平台虽然可以降本增效,但仿真环境与真机部署仍存在参数差异。
- 提出想法:
- 采用国产物理引擎替代(如SPE,是目前国产物理引擎的精品)
- 构建数字孪生校准引擎,通过真机数据反向优化仿真物理参数(如摩擦系数、惯性矩);
- 降低代码开发门槛
- 中小企业缺乏ROS专家
- 提出想法:
- 可视化编排IDE:借鉴LabVIEW模式,拖拽生成ROS节点代码框架;
- 集成AI(如DeepSeek)辅助调试,自动诊断代码异常,或一键生成/补全代码;
通信安全体系
- 自主通信协议
- 痛点:ROS1基于TCP/IP通信架构,ROS2依赖于DDS(Data Distribution Service)通信协议。协议均为欧美企业主导
- 提出想法:
- 实时调度算法、通信协议栈等技术,国产替代需绕过现有专利或自主创新(如国产汽车行业的SWIFT DDS);
- 从架构到源代码,尽量不使用开源模块,不依赖于第三方库,确保域内通信、域间通信、机器人间等各种场景下实时、安全、可靠的数据交互。
- 跨域安全策略协同
- 痛点:多机器人协作时,单节点被攻破可能导致群体失控。
- 提出想法:
- 设计分布式信任机制,基于区块链技术验证节点身份;
- 为系统增加异常隔离容器,自动隔离恶意节点并启动备份
总结性思考
- ros系统虽然称呼为系统,但是它本质上是一个协议(异步的通讯协议)所有的调度都基于这个协议来。因此,真正意义上的机器人操作系统应该把ros或许类似ros的协议都包含到内存中,而并非像现在常规的操作:先安装ubuntu然后安装ros
为此,真正意义上的基于ROS的操作系统,应该硬件上做到微内核层,仿照Linux。 把通信层植入系统内核,而ros的节点作为内核的进程、线程,在硬件上为传感器提供标准的内核驱动。 - ros系统本身也很臃肿,真正放到商业上面,有的时候自主开发一个系统比ros还快,因为ros本身主要就是通讯协议,是一个伪系统。
- 两个系统均无开放式大数据——人工智能发展的关键是大数据,而高质量、高效数据基础上降低AI落地门槛。
- ros1和ros2的编译、仿真工具(如Gazebo)仍依赖国际开源社区,国产替代未成熟。而机器人开发中,仿真可以实现降本增效。
仿真环境(如 Gazebo)允许开发者在虚拟环境中测试算法、运动规划、多机协作等场景,避免实物损坏风险。 物理引擎是仿真的基石:如 NVIDIA PhysX、Bullet 等国际引擎,直接影响碰撞检测、动力学模拟的精度。 Gazebo 是 ROS 默认仿真工具,其物理引擎依赖 ODE/Bullet 等国际开源项目,开发主导权在欧美团队手中。 - 实时性。ROS的TCP/IP通信架构在100台设备组网时,延迟会飙升到20毫秒以上。因此,微妙级实时性是高技术需求。
- 硬件兼容性,系统需要兼容更多的传感器设备,采用模块化中间件设计,只需调用标准化控制或命令接口,即可调用对应算法。为此,需要设计统一接口标准与平台兼容层。
- 虽然相比起ros1,ros2有较大的提升,但是ROS2依赖DDS实现(如Fast DDS、Cyclone DDS),多为欧美主导的开源或商业产品