引言
之前博客对Transformer以及基于Transformer的SLAM进行了解读。而最近北大开源了SLAM3R,一种实时(20+ FPS)、可稠密重建的单目SLAM系统,且也是基于Transformer架构的
为此,写下本博文记录阅读及测试过程,本博文仅供本人学习记录用~
相关的资料:
- paper
- Github
- 本博客采用的代码及注释(如有)均在Github Link
- 博客:Paper Survey之——Awesome Transformer-based SLAM
- Awesome Transformer-based SLAM
- 博客:What is Transformer? Form NLP to CV
理论解读
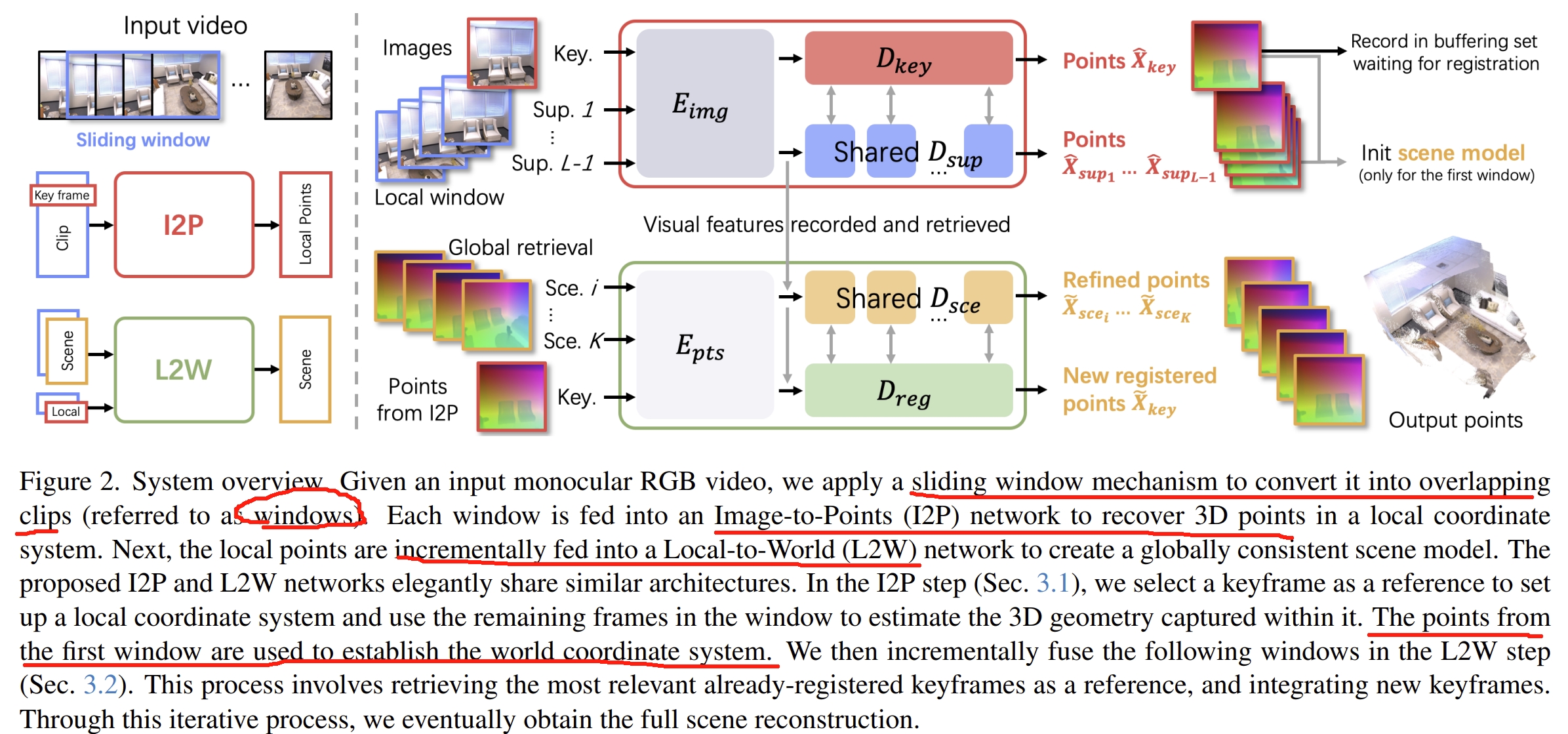
对于输入的视频流,首先先通过滑窗的机制将其转换成有overlapping的片段,而由于采用了DUSt3R的架构,因此可以直接从每个窗口的RGB图像获取3D point map。 SLAM3R分为两个层次架构:
- Images-to-Points (I2P) network :通过滑动窗口来处理来自输入视频流的短片段,然后提取局部的3D几何信息
- Local-to-World (L2W) network:将这些获得的3D局部信息逐步登记,以获取全局一致性的3D场景 而I2P应该也就是DUSt3R,只是只会处理关键帧的信号,并且可以处理multiple view; 而L2W网络则是增量数处理来自于DUSt3R的信息最终获取全局三维环境。
I2P和L2W两个网络都是基于DUSt3R的架构(做了小量的更改),训练的时候都是用DUSt3R的权重来初始化的
PS:个人感觉,SLAM3R本质上跟MASt3R-SLAM有点像,只不过是用MASt3R与DUSt3R的区别,且MASt3R-SLAM更接近于传统SLAM的思想,以two-view 3D point matching为架构搭建一个新的SLAM体系,但是SLAM3R则是把DUSt3R改成SLAM的输入输出流~
至于架构的理念感觉跟Spann3R是很像的,虽然在introduction提到了Spann3R缺点是会存在累积误差,但是作者自己也在Limitation提到SLAM3R在大场景也存在累积误差。
系统框架如下图所示。I2P将输入的窗口中的数据转换为3D pointmap,而系统也会从每个窗口中选择关键帧(窗口中的中间图片为关键帧)来作为当前point reconstruction的reference coordinate.而全局的初始坐标则是用第一个窗口
I2P相比起DUSt3R的改进应该是:
- 采用multi-branch ViT,这样可以适用于多视角的输入(在这点上,MASt3R-SLAM应该仍然是两个视角输入的处理)
- decoder部分,DUSt3R用的是标准的cross attention,此处用的是
multi-view cross-attention
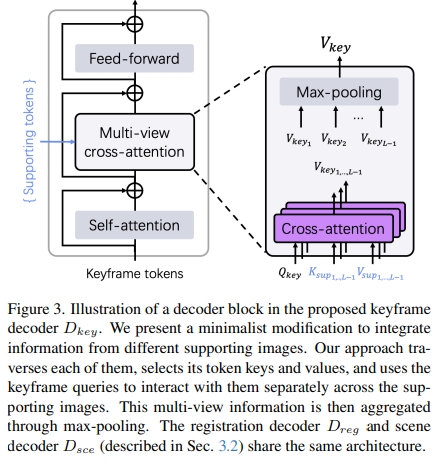
看上去似乎是将多个视角下得到的token都进行cross-attention,网络结构都是不变的,只是引入更多的数据流一起运算。
至于训练就跟DUSt3R一样,用GT scene point于估算的point map求loss:

对于I2W部分此处略过,感觉跟I2P差不多,只是改变一些DUSt3R的数据流,毕竟实验部分训练也提到尽量把网络架构的参数跟DUSt3R保持一致,可以用其预训练权重的~
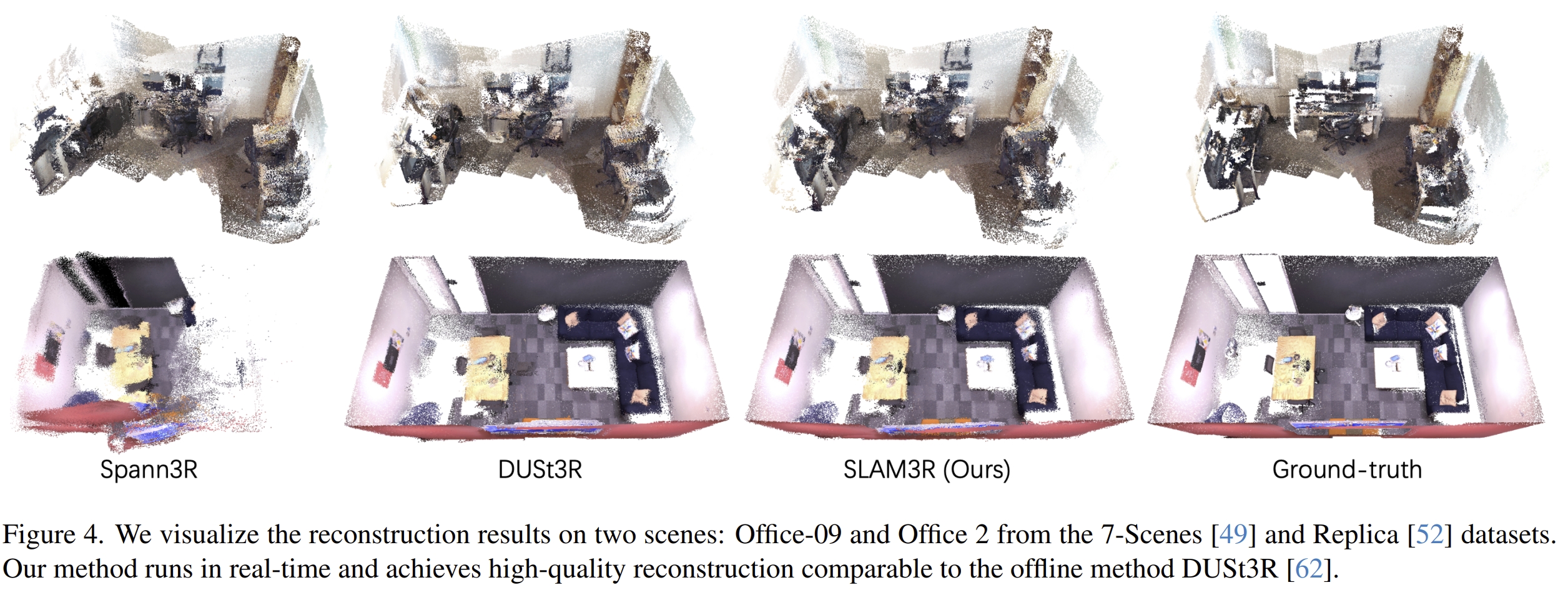
论文的实验效果
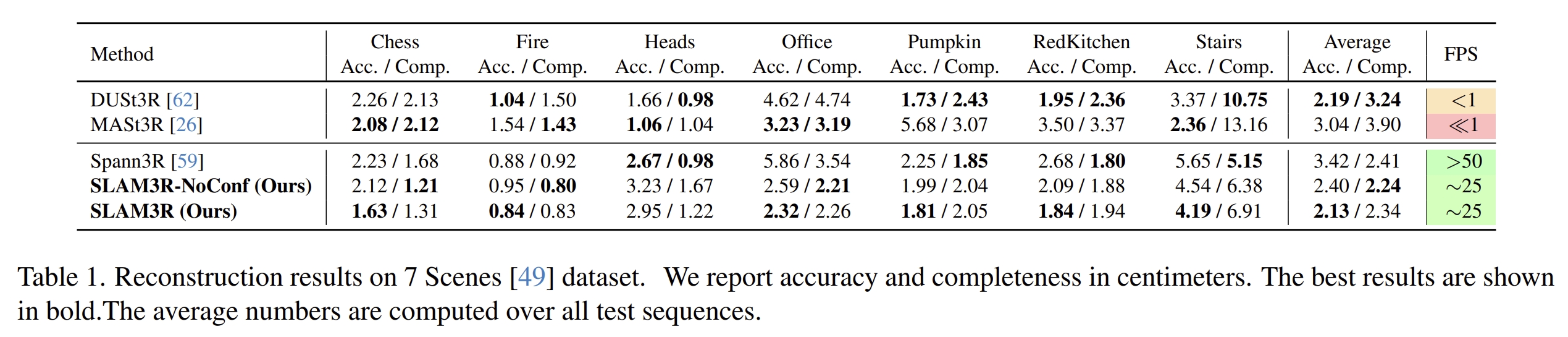
首先看三维重建的效果,其中SLAM3R-NoConf是直接用所有帧预测出的全部的pointmap来进行重建的结果,而SLAM3R则是原系统(有根据confidence map filtering处理的)
其他的实验就属于消融实验来分析各个模块的性能了~
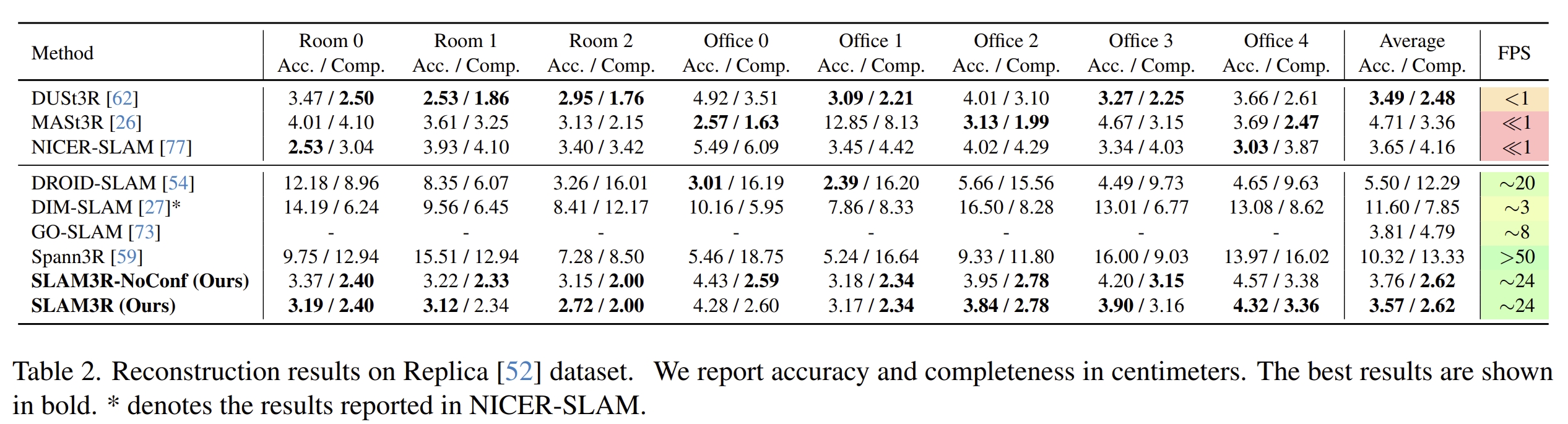
而在附加材料中有精度对比的实验
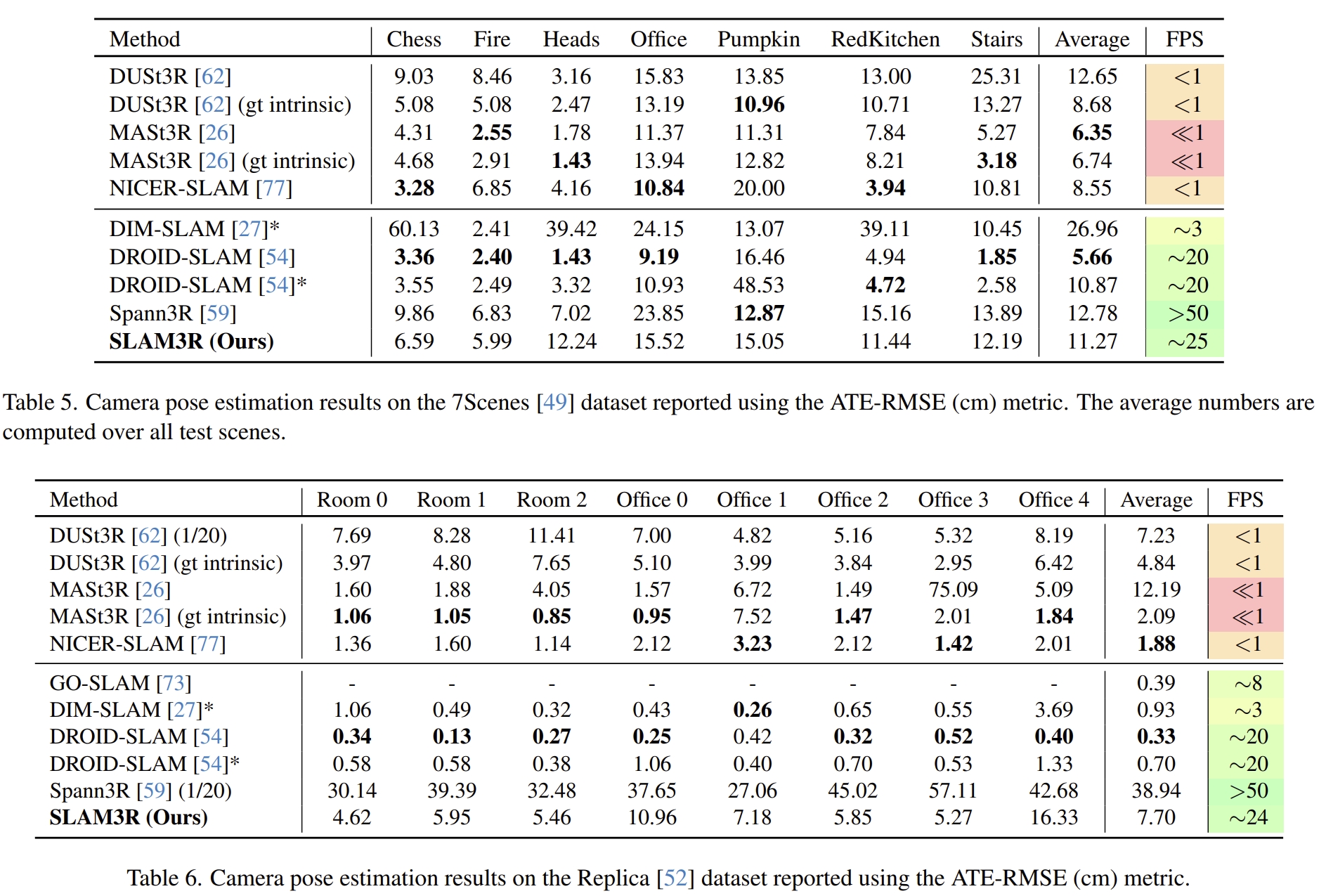
看似效果是没有超越DROID-SLAM的,也没有跟ORB-SLAM,DPVO或DPV-SLAM对比,应该从定位上来看是稍逊于MASt3R-SLAM的,MASt3R-SLAM在经典的精度评估数据集TUM上超越传统的方法
实验测试
配置测试
git clone https://github.com/KwanWaiPang/SLAM3R.git
conda create -n slam3r python=3.11 cmake=3.14.0
conda activate slam3r
# conda remove --name slam3r --all
# install torch according to your cuda version
# pip install torch==2.5.0 torchvision==0.20.0 torchaudio==2.5.0 --index-url https://download.pytorch.org/whl/cu118
# 实验中采用A100 CUDA 12.2
pip install torch==2.5.0 torchvision==0.20.0 torchaudio==2.5.0 --index-url https://download.pytorch.org/whl/cu121
pip install -r requirements.txt
# optional: install additional packages to support visualization (可视化安装包)
pip install -r requirements_vis.txt
- Accelerate SLAM3R with XFormers and custom cuda kernels for RoPE (加速器)由于也是采用跟作者一样的torch==2.5.0,因此应该是一样的下载
# install XFormers according to your pytorch version, see https://github.com/facebookresearch/xformers pip install xformers==0.0.28.post2 # compile cuda kernels for RoPE cd slam3r/pos_embed/curope/ python setup.py build_ext --inplace cd ../../../
接下来下载模型(但似乎运行的时候也会自动下载模型,此处先跳过~)

- 关于googledrie下载数据集到服务器请见博客
pip install gdown
gdown https://drive.google.com/uc?id=标识符
gdown https://drive.google.com/uc?id=1NmBtJ2A30qEzdwM0kluXJOp2d1Y4cRcO
gdown https://drive.google.com/uc?id=1FVLFXgepsqZGkIwg4RdeR5ko_xorKyGt
#下载Replica数据集
wget https://cvg-data.inf.ethz.ch/nice-slam/data/Replica.zip
unzip ***.zip -d dataset/***
注意数据集的名字如果改了,对应的demo_wild.sh文档里面要改路径
运行测试
#用open3D来可视化,需要用MobaXterm
cd SLAM3R
conda activate slam3r
bash scripts/demo_wild.sh
#或者运行replica
# bash scripts/demo_replica.sh
#下面在MobaXterm中运行,而且要等上面的运行完生成完文件才行~
bash scripts/demo_vis_wild.sh
- 结果会存放在
./results/文件中

但是运行可视化还是什么都没有,open3d窗口并没有跳出来,隔了一段时间后报错AttributeError: 'NoneType' object has no attribute 'point_size'
这似乎是由于我用远程服务器可视化导致的,别人在github issue似乎都不存在这个问题,并且可以正常可视化~
尝试升级open3d以及更新Conda 环境中的 libstdc++,应该是可以解决的~
pip install open3d --upgrade
# 更新一下下面即可解决
conda install -c conda-forge libstdcxx-ng
可视化增量式建图
然后作者在github中提到Please click space key to record the adjusted rendering view and close the window. The code will then do the rendering of the incremental reconstruction.
也就是要先输入空格,然后关掉窗口即可,最终还会把渲染的结果用mp4保存下来~
如下demo所示

下面以Library为例,看看保存下来的视频是怎么样的~
采用Gradio interface测试
vscode运行下面代码
conda activate slam3r
python app.py
然后打开页面,如下:

- 测试作者给的Library以及room0数据集的效果如下:
- 接下来测试室外经典的train数据看看
- 然后测试自己的数据集看看(注意,单张图片或者两张图片都是不能成功的,应该是对于input window的radius有关,默认设置为5)
将the radius of the input window和the number of frames for initialization改为2(至少是2)看看两个视角下的效果:
感觉跟VGGT比起来要稍差一些,特别是点云的平整度跟完整度,当然也可能是我设置点云的size以及confidence map不匹配导致的~