引言
最近开源了一个基于lidar的2DGS工作。写下本博文,记录进行配置测试过程。
本博文仅供本人学习记录用~
- paper
- code
- 本博文复现过程采用的代码及代码注释(如有):My github repository
- paper list for the 3DGS:Awesome-3DGS-SLAM
理论解读
本文提出的就是一个基于lidar以及2DGS场景表征的SLAM系统。并且是纯lidar没有跟image或者IMU相结合。 系统的框架如下图所示
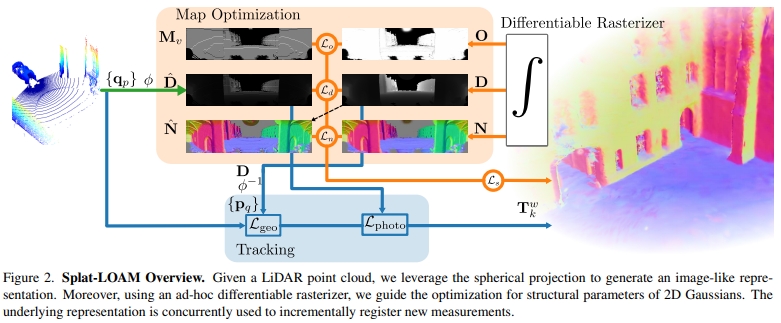
直观来看应该就是把lidar点云投影成image,然后走2DGS一套。个人觉得跟最开始的lidar-based 3DGS《Drivinggaussian: Composite gaussian splatting for surrounding dynamic autonomous driving scenes》应该是很像的~ 对比的方法则是用基于nerf的或者voxelbox的,没有跟最经典的算法进行对比。
实验测试
安装配置
- 可以采用作者提供的Docker或者Pixi,不过此处采用conda配置:
git clone --recursive https://github.com/R-C-Group/Splat-LOAM.git
# rm -rf .git
conda env create -f environment.yaml # for A100 with CUDA12.2/12.1
# # conda remove --name Splat-LOAM --all
conda activate Splat-LOAM
# bash post_install.sh
# 安装第一个模块
pip install ./submodules/diff-surfel-spherical-rasterization/
# 安装第二个模块
pip install ./submodules/gsaligner/
# 安装第三个模块
pip install ./submodules/simple-knn/
实验测试
configs文件中含有运行所需要的配置- 运行代码(注意要修改数据的路径,同时下载kitti数据)
python3 run.py slam <path/to/config.yaml>
conda activate Splat-LOAM
python3 run.py slam configs/kitti/kitti-00-odom.yaml
- 注意,上述需要在
sequences/00内还要有times.txt文件,故此需要下载图像帧 - 下面是成功运行的截图:

[!TIP] If you want to solve
Mapping-only, provide a trajectory indata.trajectory_reader.filename, set tracking to use it withtracking.method=gtand enable skipping of clouds that have no associated pose withdata.skip_clouds_wno_sync=true
- 运行后提醒打开浏览器
http://127.0.0.1:9876/,但是加载好久都加载不出来(改为MobaXterm即可)

- 若
output.folder没有设置,实验结果会保存在results/<date_of_the_experiment>/文件中(但实际运行中会遇到没有results导致跑了几个小时后没法保存模型…)

- 运行完SLAM后(运行的时间应该要好几个小时),接下来可以基于SLAM的结果来生成mesh:
python3 run.py mesh <path/to/result/folder>
# conda activate Splat-LOAM
# python3 run.py mesh /home/gwp/Splat-LOAM/results/2025-06-19_09-40-53

.ply文件拉到在线网站进行可视化:

- 为了验证所计算的mesh以及odometry,运行下面命令:
python3 run.py eval_recon <reference_pointcloud_file> <estimate_mesh>
python3 run.py eval_odom <path/to/odom/estimate> \
--reference-filename <path/to/reference/trajectory> \
--reference-format <tum|kitti|vilens> \
--estimate-format <tum|kitti|vilens> \