引言
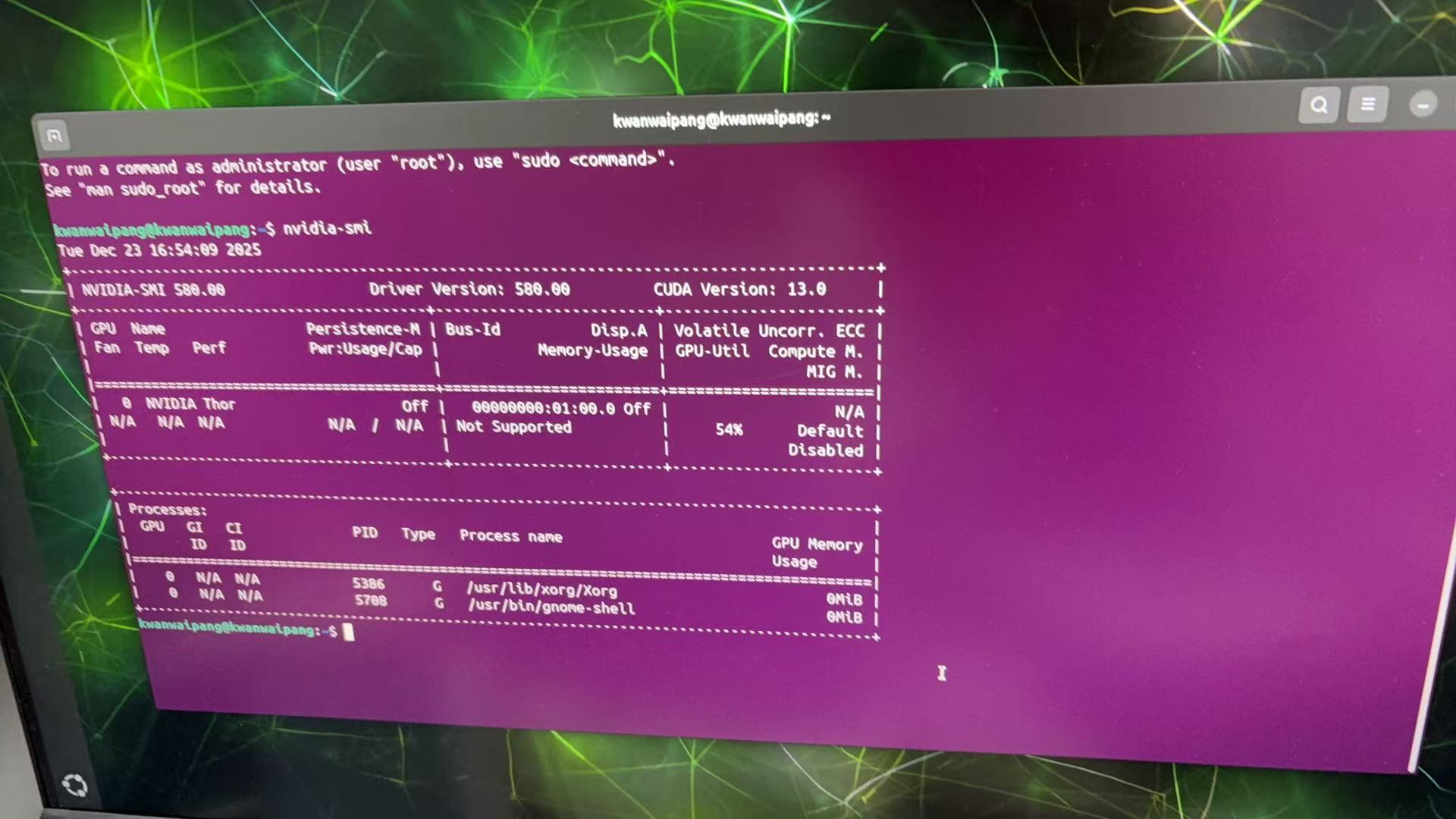
NVIDIA® Jetson Thor™ 系列模组为物理 AI 和机器人开发提供出色的平台,可提供高达 2070 FP4 TFLOPS 的 AI 计算性能和 128 GB 显存,功率可配置在 40 W 到 130 W 之间。与 NVIDIA AGX Orin™ 相比,Jetson Thor 系列模组的 AI 计算性能提高至 7.5 倍以上,能效提高至 3.5 倍。
本博文对Thor做初步配置与测评。
性能分析
首先先来看看其参数指标
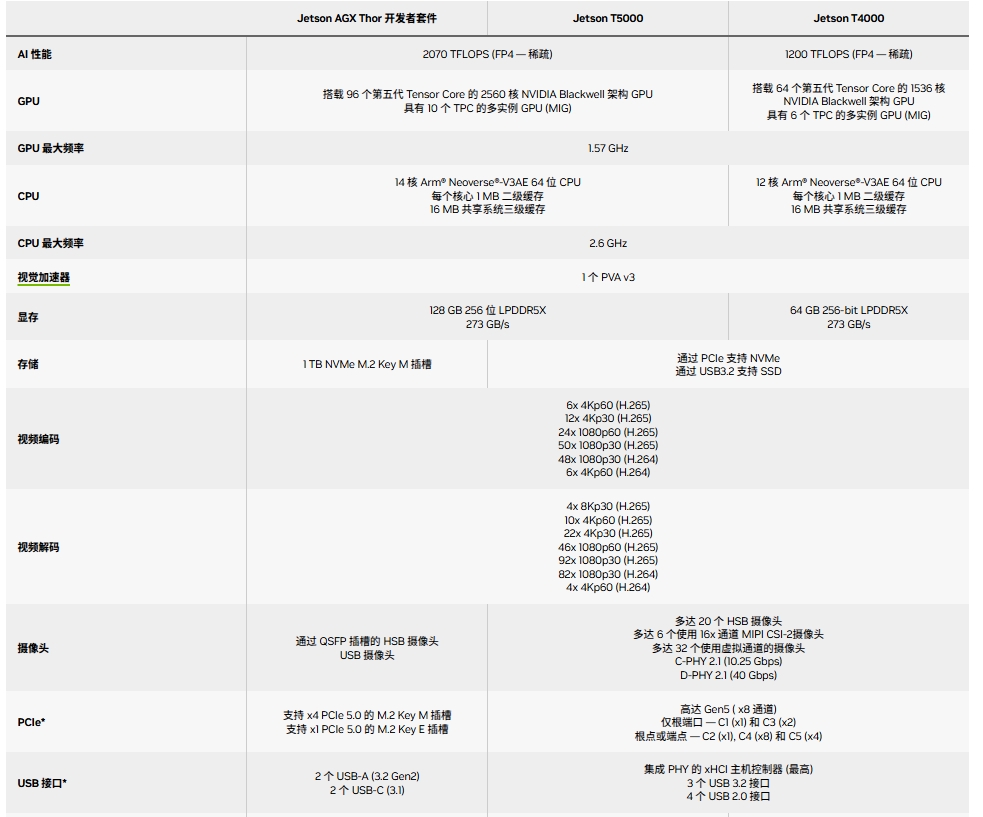
Thor是14 核 Arm® Neoverse®-V3AE 64 位 CPU,主频2.6G,内存128G.
下面以常用的RK3588为例,RK3588用的是4* Cortex-A76 + 4*Cortex-A55,主频2.4G,内存8G
- Neoverse V3AE CPU是专为高性能汽车设计的Armv9架构的
- Cortex-A76,其架构应该是Armv8
- 与Arm的Cortex-A78AE相比,Neoverse V3AE每核性能可提升50%,而Cortex-A78AE相比Cortex-A76提升约20%
刷机部署
开机系统安装

首先启动盘是同伴帮忙安装的,直接插入即可识别。
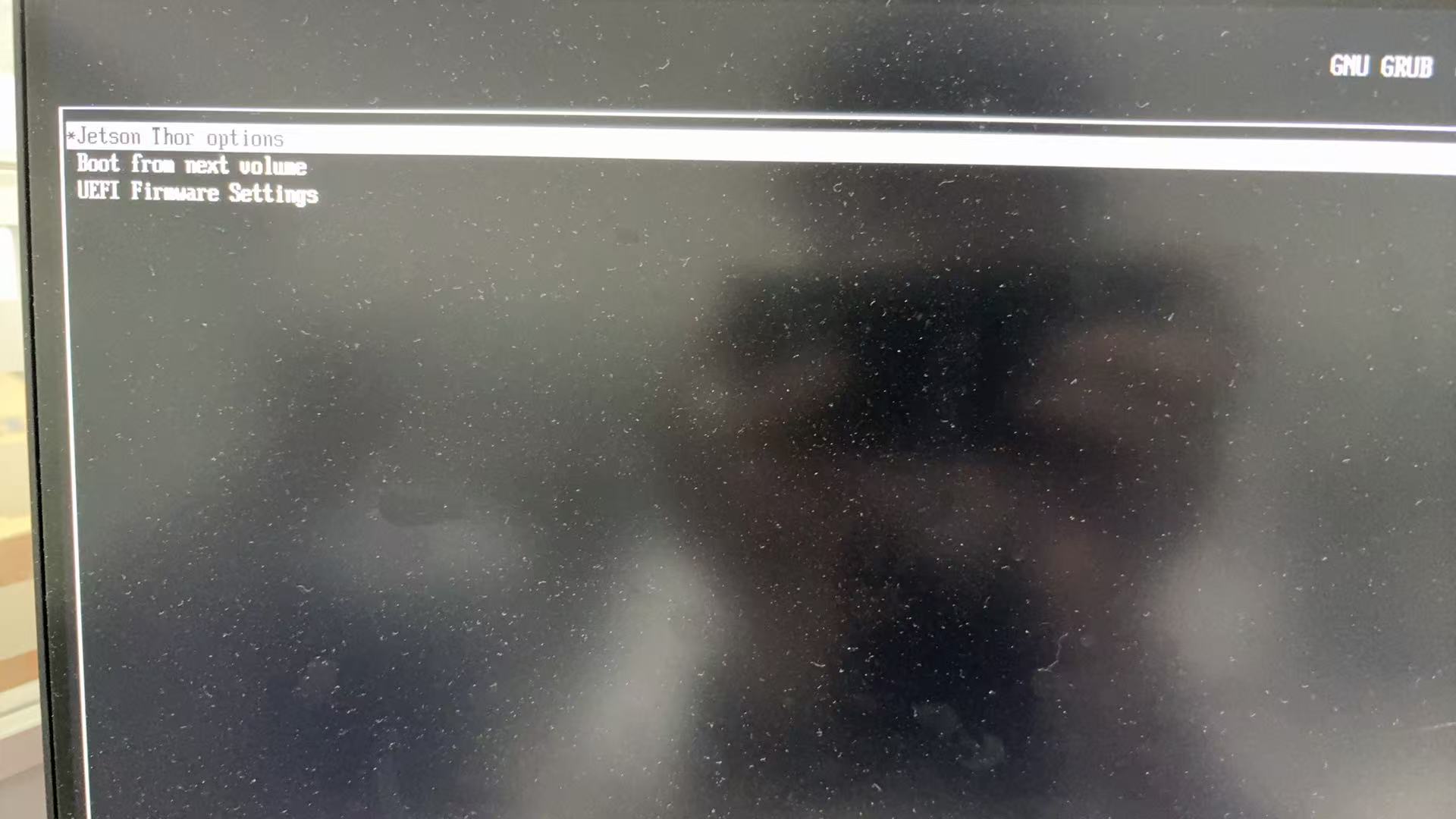
基本直接按Enter就可以一路安装:选择“Jetson Thor options”—> Flash Jetson Thor AGX Developer Kit on NVMe—>按 Enter 开始安装
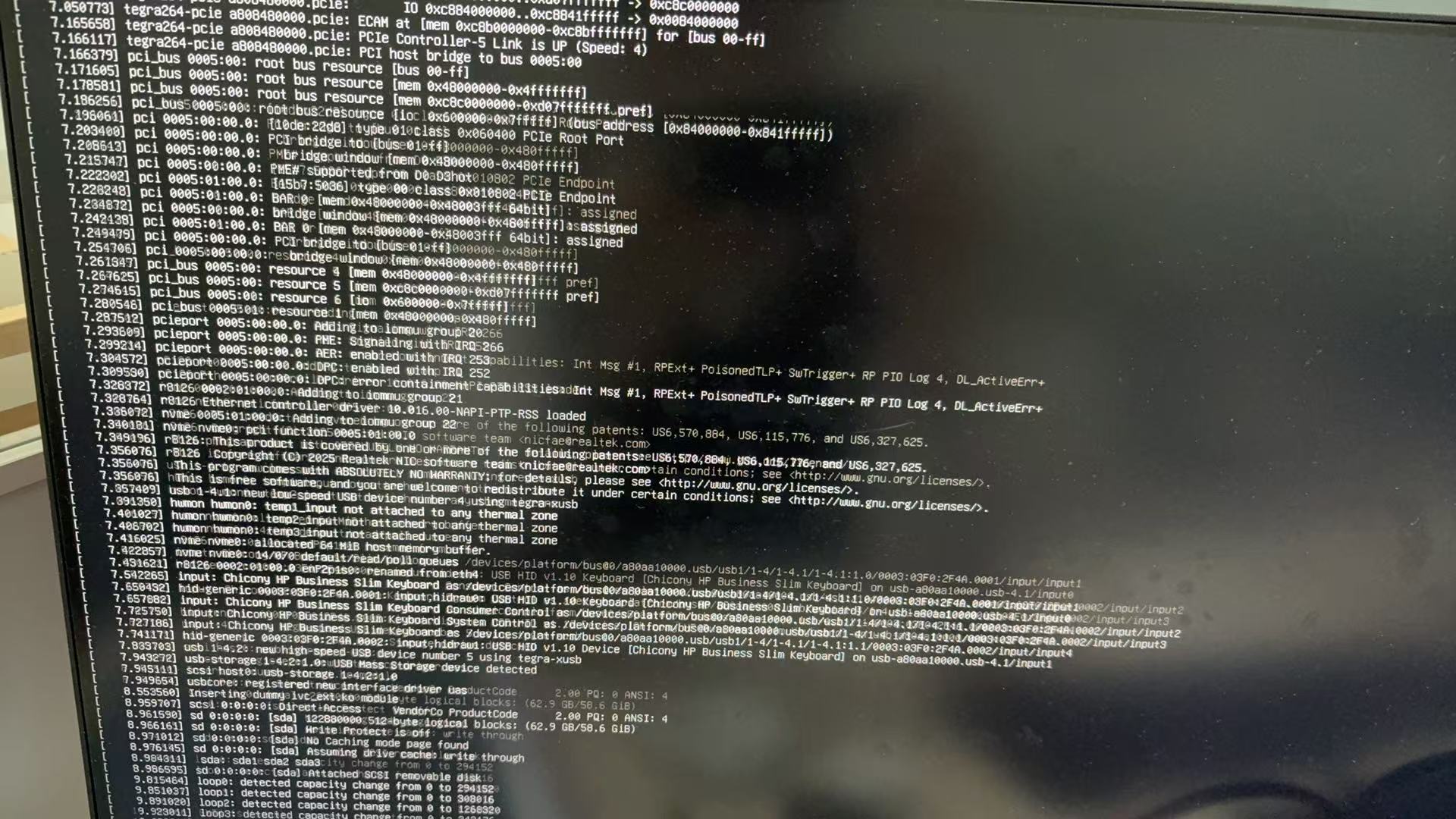
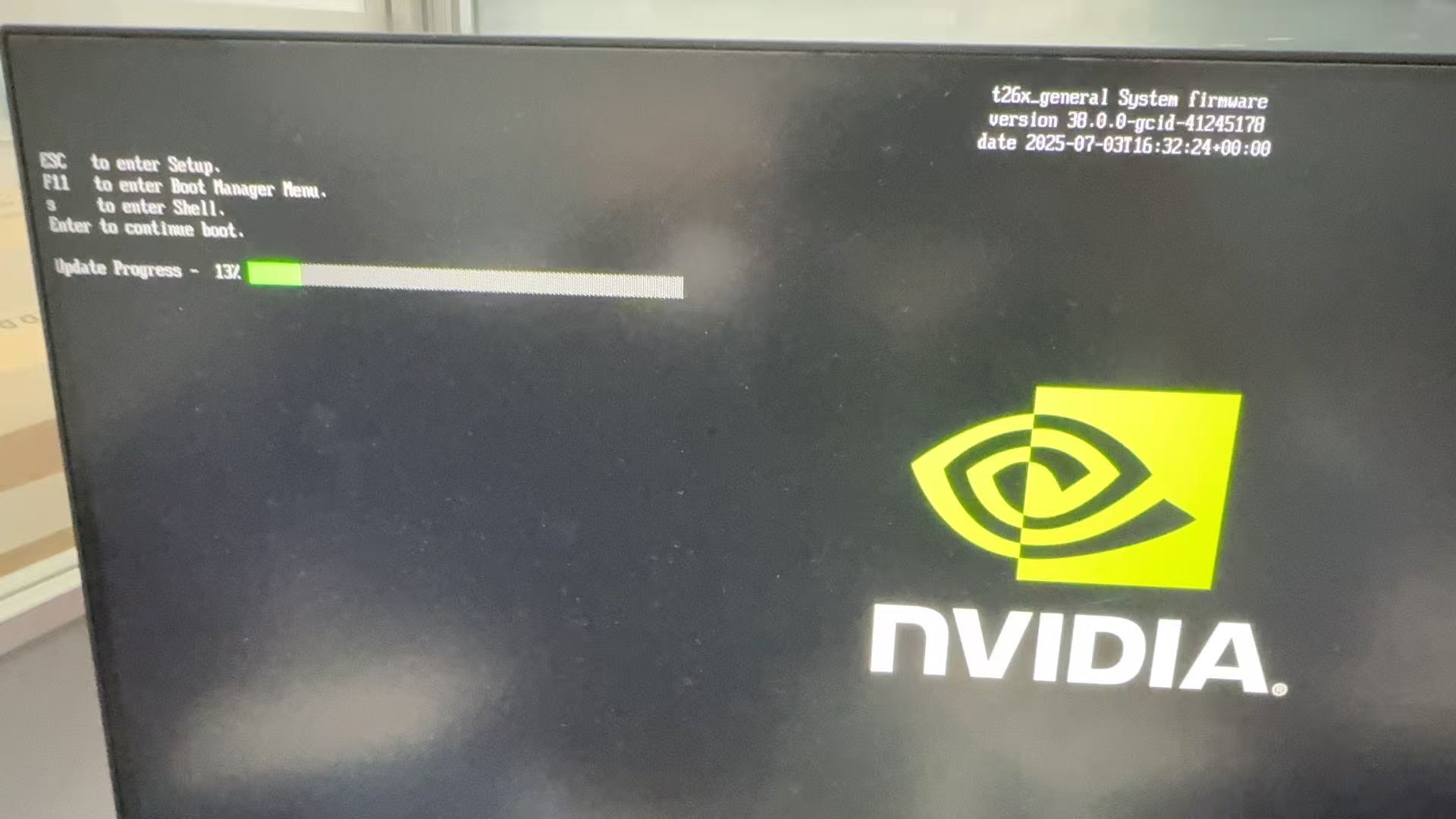
安装过程约 15 分钟,期间会有命令行输出,一直等待。 安装完成后设备会自动重启,并可能进行 UEFI 固件更新。更新后会再次重启,进入 Ubuntu 初始配置界面(oem-config)。 接下来就是普通的ubuntu初始化了(安装的是24.03.02LTS)
注意,设置用户名字的时候不要联网,不然有可能报“name not unique on network”导致无法跳转下一步
网络链接
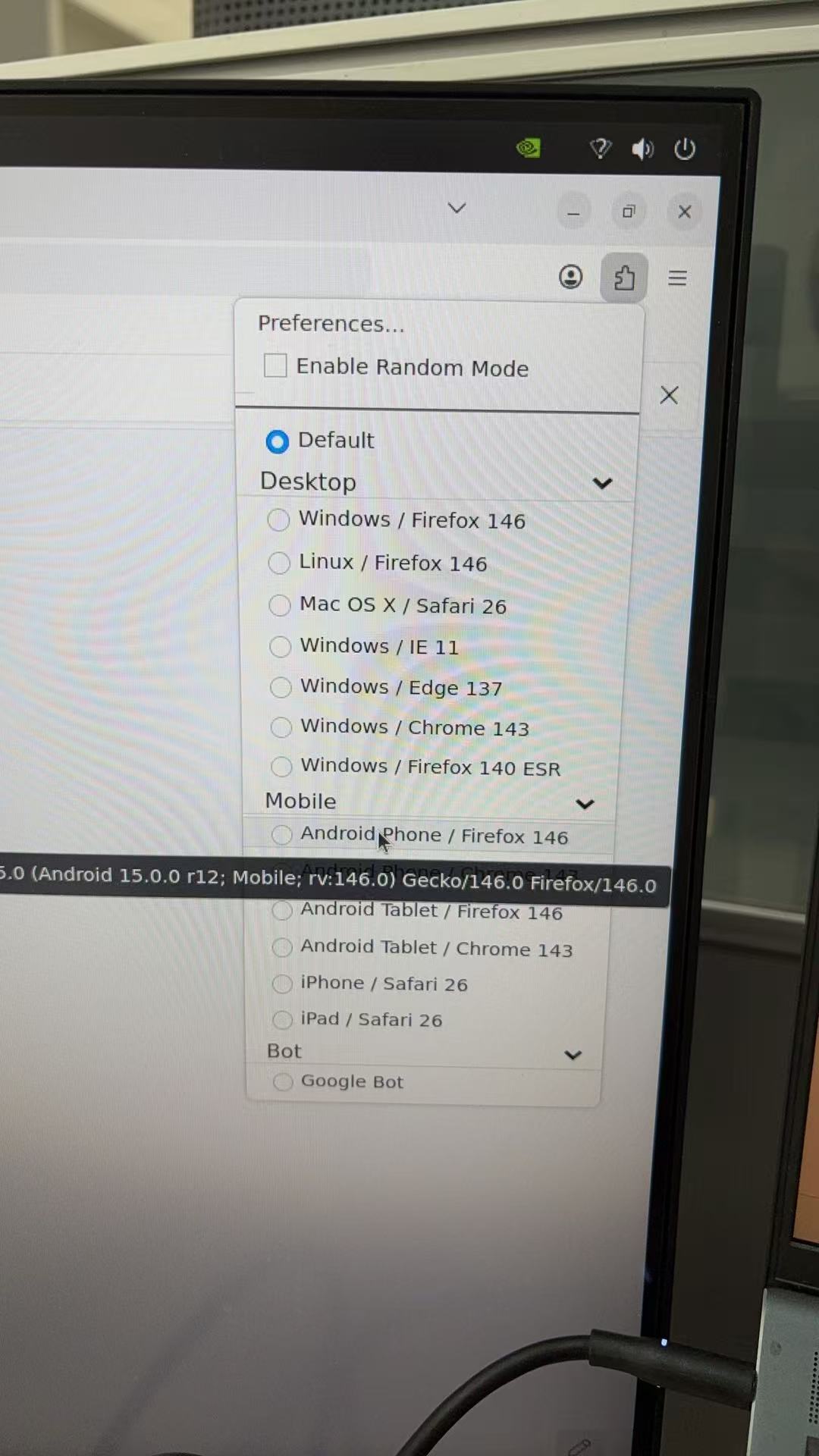
ubuntu24.04是没有自带的浏览器,先运行命令安装sudo snap install firefox
安装完后,通过网站安装一个插件可以切换手机版:在搜索框输入 "User-Agent"
安装完系统后,接上网线。然后输入ifconfig即可查看ip。链接的方式为:
ssh 用户名@服务器IP -p 端口号
# enP2p1s0 下方紧跟的 inet 后面的数字为IP
# 通过sudo ss -tunlp | grep :22查看SSH 端口是否开启,看到 LISTEN 状态,说明 22 端口已准备好接收远程连接。
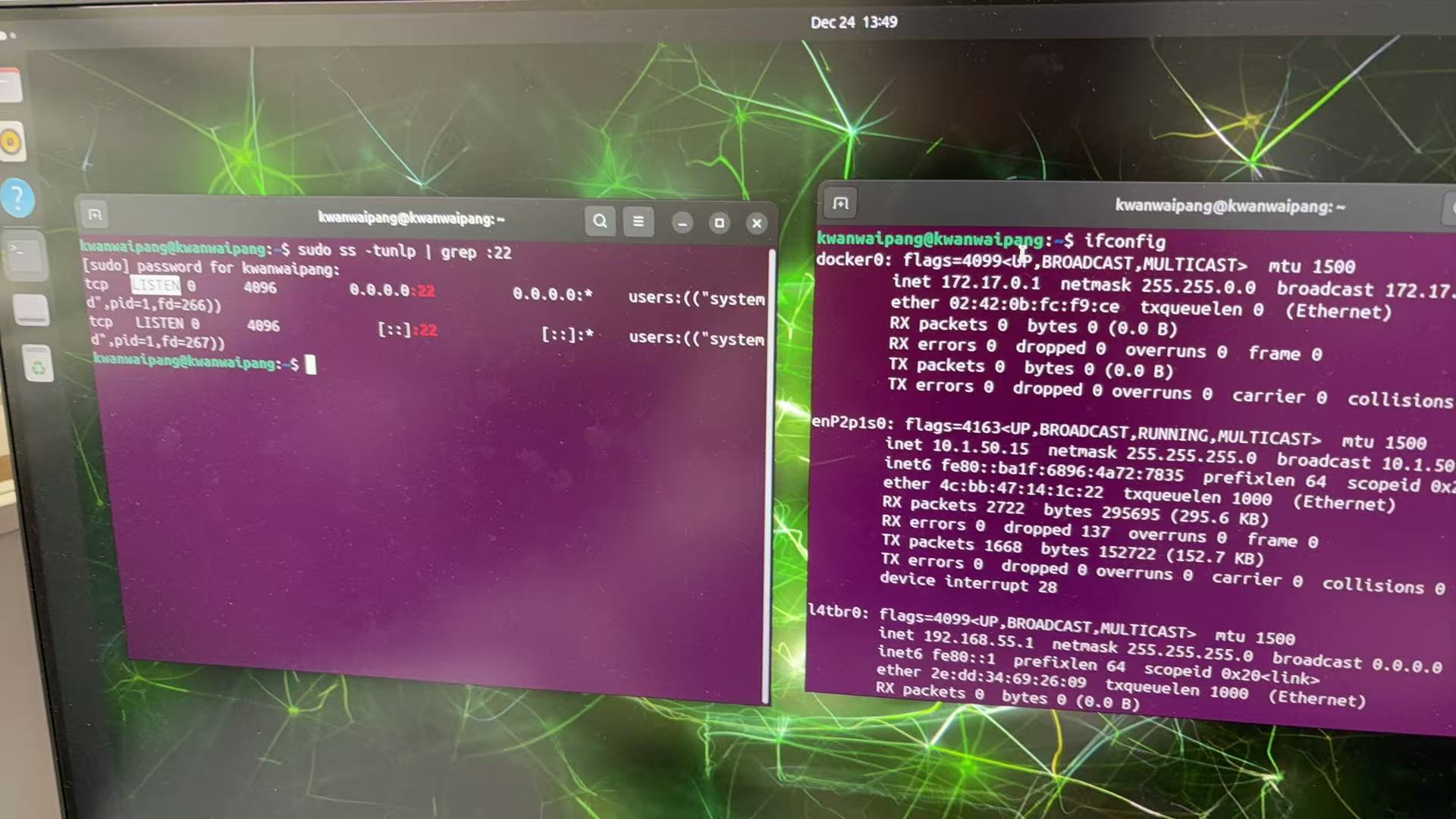
接下来通过ssh kwanwaipang@10.1.50.15 -p 22链接,此外,也可以参考博客,将公钥传到服务器上
ssh-copy-id -i "C:\Users\gwpsc\.ssh\id_rsa" -p 22 kwanwaipang@10.1.50.15
用户设置
除了最开始设定的用户以外,毕竟是服务器,因此多创建几个用户给其他同伴使用。
# 创建的用户名为xxx
sudo adduser username
# 设置或修改用户密码
sudo passwd username
# 仅删除用户: 保留该用户的家目录和文件。
sudo deluser username
# 彻底删除: 同时删除用户的家目录和邮件池。
sudo deluser --remove-home username
# 将用户添加到 sudo 组
sudo usermod -aG sudo username
# 将用户从 sudo 组中移除
sudo deluser username sudo
# 查看所有用户信息
cut -d: -f1 /etc/passwd
getent group sudo # 查看sudo权限用户
另外补充远程关机命令如下:
sudo shutdown -h now #立刻关机
sudo shutdown -h 10 #10分钟后自动关机
sudo reboot #重启
JetPack安装
接下来进行JetPack APT repo的安装,通过Native模式的方式安装可以一口气将 CUDA 和 Jetpack 都安装上;
sudo apt update
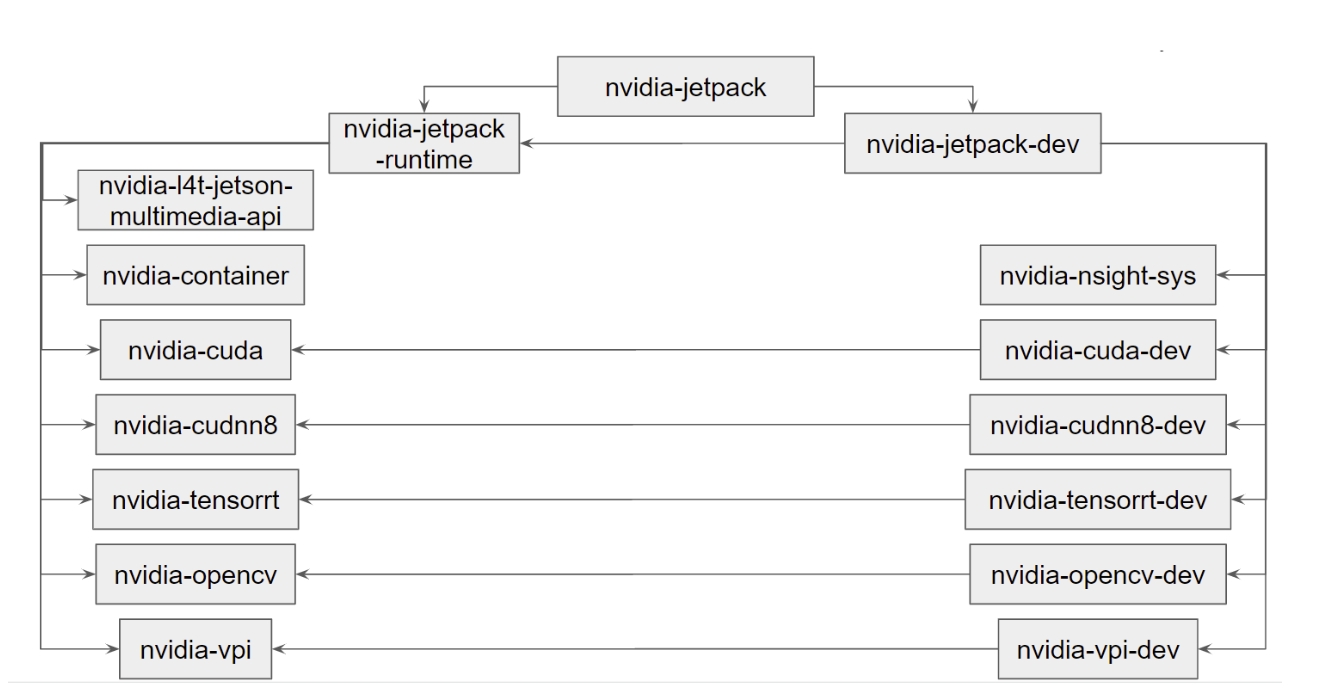
sudo apt install nvidia-jetpack
echo "export PATH=/usr/local/cuda/bin:$PATH" >> ~/.bashrc
echo "export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH" >> ~/.bashrc
source ~/.bashrc
这一条命令将安装下面这些组件,包含开发过程中所需的全部资源:
安装成功后,通过nvcc -V查看安装的情况:

安装Conda
具体可参考博客
# 注意是ARM架构
wget https://repo.anaconda.com/archive/Anaconda3-2025.12-1-Linux-aarch64.sh
# 执行下面命令进行安装
chmod +x Anaconda3-2025.12-1-Linux-aarch64.sh
./Anaconda3-2025.12-1-Linux-aarch64.sh
# 验证是否安装成功
conda --version
安装ROS2
Thor安装的是ubuntu24.04,对应的ROS2是Jazzy
lsb_release -a #再次确认系统是Ubuntu24.04
# 设置 UTF-8 支持 确保系统支持 UTF-8 编码。运行以下命令检查并设置 UTF-8:
locale # 查看当前 locale 配置
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 验证配置

- 安装 curl、gnupg 和 lsb-release 三个包:
- curl:用于下载文件,设置 ROS 2 仓库。
- gnupg:用于处理 GPG 密钥,验证下载的包的来源。
- lsb-release:提供有关操作系统版本的信息,ROS 2 使用它来确认系统的版本和发行信息。
sudo apt install curl gnupg lsb-release -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt install ros-jazzy-desktop
# source /opt/ros/jazzy/setup.bash
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
- 验证是否安装成功
# C++ 发布者节点(talker)
ros2 run demo_nodes_cpp talker
# Python 订阅者节点(listener)
ros2 run demo_nodes_py listener
# 小海龟仿真示例
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
# 下面命令查看ROS2版本
echo $ROS_DISTRO
安装中文字体
sudo apt update
sudo apt install fonts-wqy-zenhei fonts-wqy-microhei #安装基础中文字体
fc-cache -fv #强制刷新字体缓存
sudo apt install language-pack-zh-hans
实验测评
- 安装工具
pip install nvitop用于查看代码的资源使用情况
接下来测试各种之前已经跑过的算法看看效果: