引言
之前博客对Transformer以及基于Transformer的SLAM进行了解读。而最近Oxford以及Meta AI在CVPR2025新开源了VGGT可以实现推理场景中的所有的关键三维属性(如:相机的内参与外参,point map,深度图,3D点跟踪)。
为此,写下本博文记录阅读及测试过程,本博文仅供本人学习记录用~
相关的资料:
- paper
- Github
- Awesome Transformer-based SLAM
- Paper Survey之——Awesome Transformer-based SLAM
- What is Transformer? Form NLP to CV
理论解读
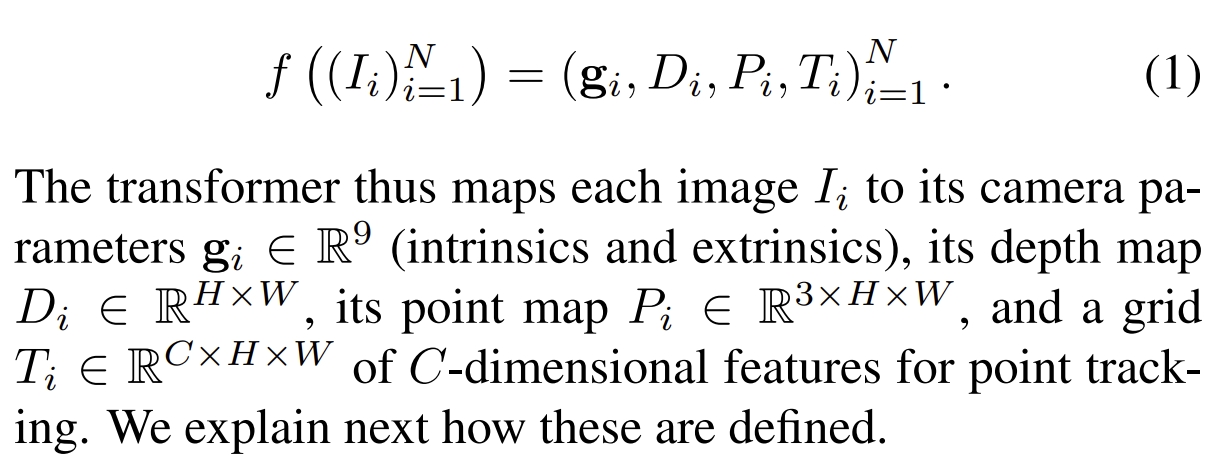
VGGT是一个 large feed-forward transformer,通过输入高达数百张图片,一次(少于1秒)预测出所有图片的三维属性(相机的内参与外参,point map,深度图,3D点跟踪),并且在这些3D task的任务中都取得非常优异的性能,并且进一步的把这个预训练的VGGT用到下游任务(如非刚体点跟踪,新视角合成)的feature backbone中也可以获得更好的性能~
跟DUSt3R和MASt3R一样,VGGT则是针对几乎完全避免几何后处理来直接解决3D tasks,但不一样的是前两着本质上还是处理成对图片,而VGGT则是一次输入,不需要任何额外的后端优化。
VGGT的结构如下图所示。
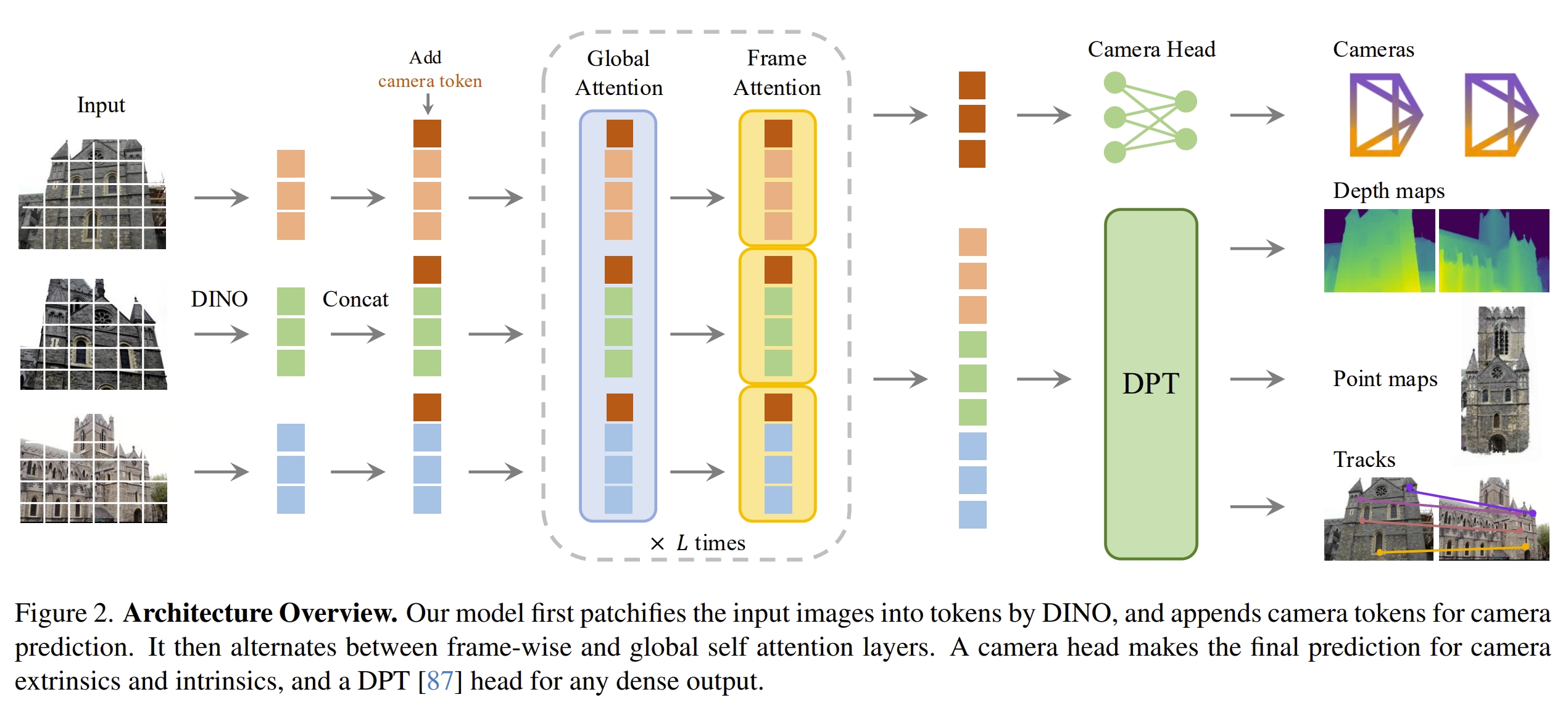
注意,VGGT跟DUSt3R不一样,各个输出并不是独立的(DUSt3R的部分结果是额外推理得到的,比如pose可以通过pnp来计算出来)。因此,VGGT训练的时候是一个针对四个task的统一的loss,如下图所示

具体各个loss的定义请见原文(此处先跳过)
而训练采用的数据大致跟MASt3R差不多
对于输入的图片,先用DINO V2(《Dinov2: Learning robust visual features without supervision》)来获取K个token,然后通过alternating-attention(应该也就是执行标准的transformer L(L=24)次),而对于输出的prediction heads:
- camera parameters:4个self-attention layers+一个全连接层
- dense map,point map和tracking feature:都是用DPT layer(《Vision transformers for dense prediction》)
- 至于实现tracking的过程,则是采用CoTracker2结构(《Cotracker: It is better to track together》)
论文的结果
论文的实验可以说是非常solid的,也展示非常强大的泛化能力
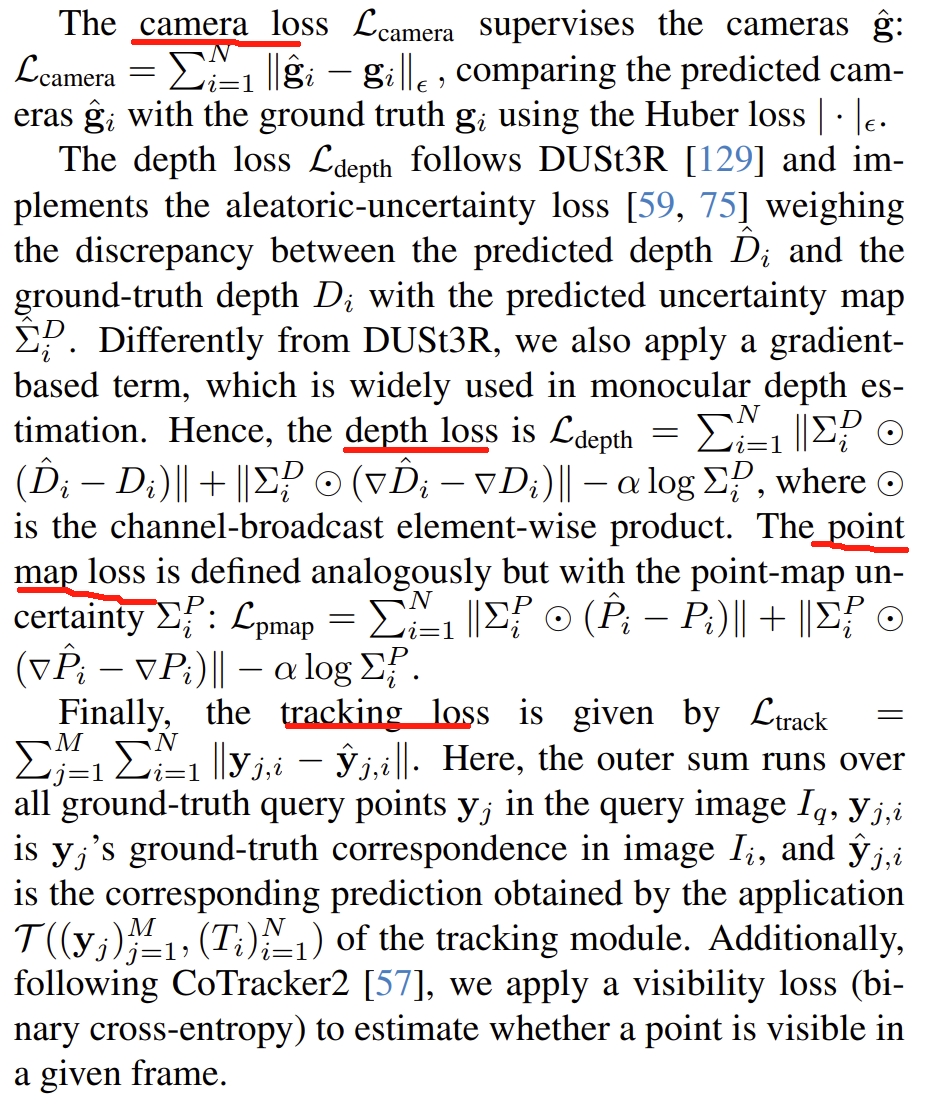
- 首先是pose estimation,如下图所示. 采用的评判指标是AUC(综合了Relative Rotation Accuracy (RRA)和Relative Translation Accuracy RTA,虽然是SLAM中比较少见的,但估计是为了跟PoseDiffusion对比)。 可以看到,时间上用时是最短的,而精度也是最高的。序列都是在Co3Dv2下训练,没有在Re10K下训练过的。对于像DUSt3R和MASt3R这种还是有global BA的也远不如VGGT。
此外,加上BA后,VGGT的性能会更好,而VGGT本身就可以获得精度比较搞的point/depth map,这可以给BA提供较好的初始化,也不需要三角化或者iterative refinement等一系列的操作
- 深度估计的实验对比,如下所示。只有DUSt3R和VGGT不需要GT pose,而MASt3R要估算深度是需要基于camera pose来做三角化的。 而VGGT也是取得最佳的performance的
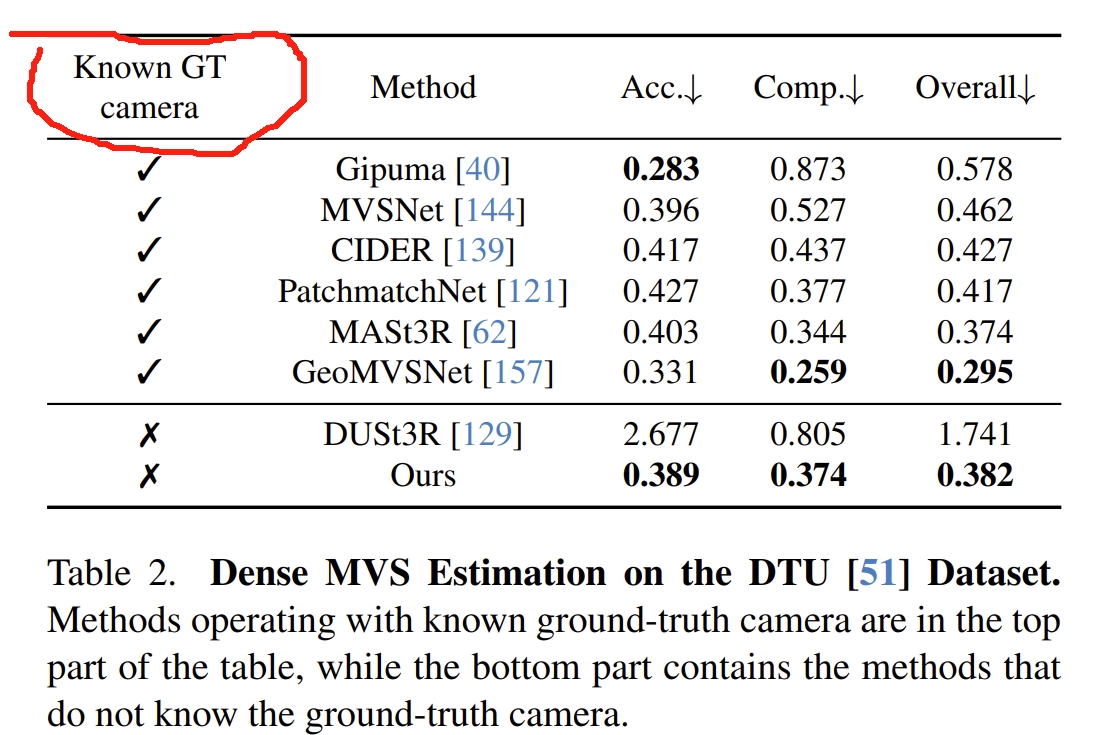
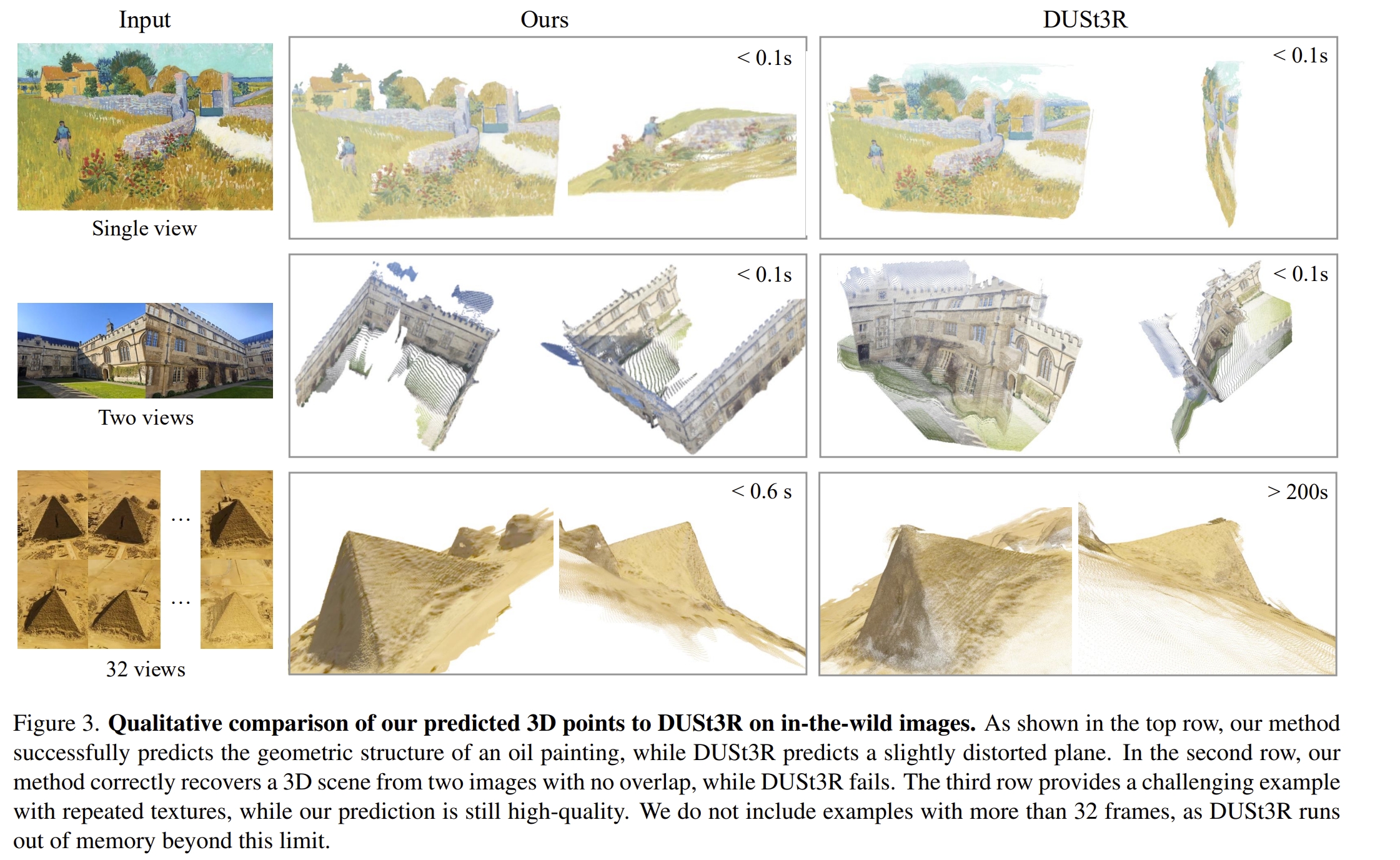
- point map估算的效果。如下左图所示,DUSt3R输入多张image的时候是成对的处理的,因此当32张图输入,时间爆炸式增长到200s但是VGGT仍然是0.6s。相比起单张或者两张图片的输入,时间增长并没有DUSt3R那么大。
|
|
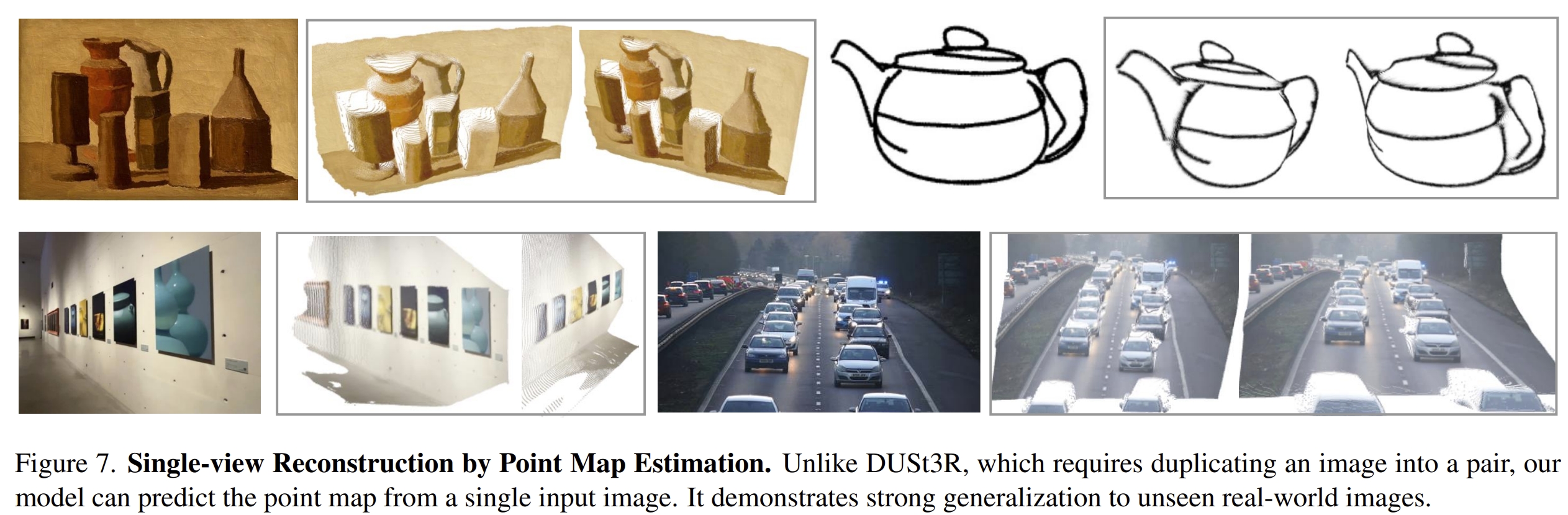
此外,DUSt3R和MASt3R在处理单张图片输入的时候,是duplicate 图像的,但是VGGT则是实在的支持单张图片的输入,故此上左图可以看到单张图像的输入时,比DUSt3R要好些~
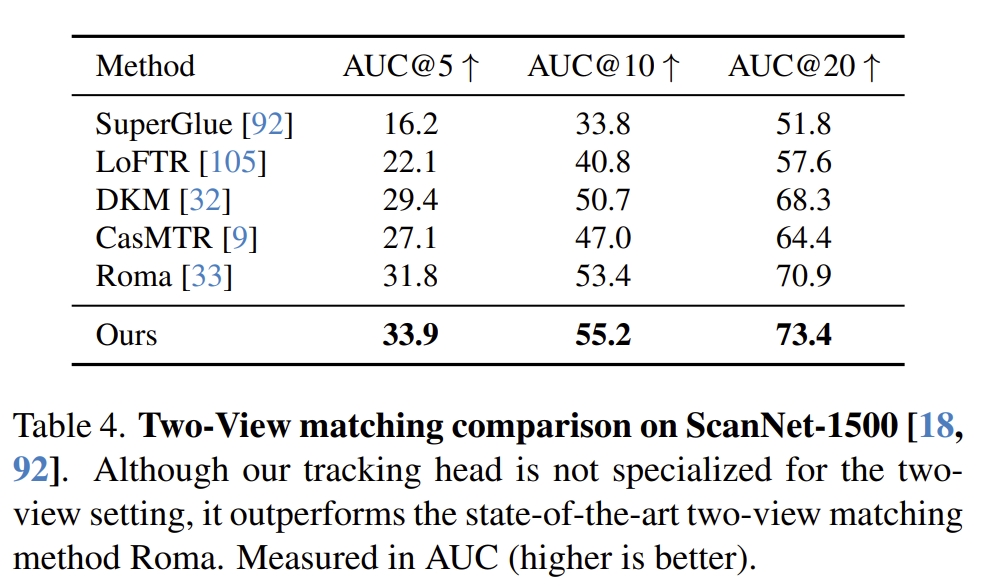
- 下面则是跟SuperGlue、LoFTR等image matching的方法对比,VGGT也是SOTA
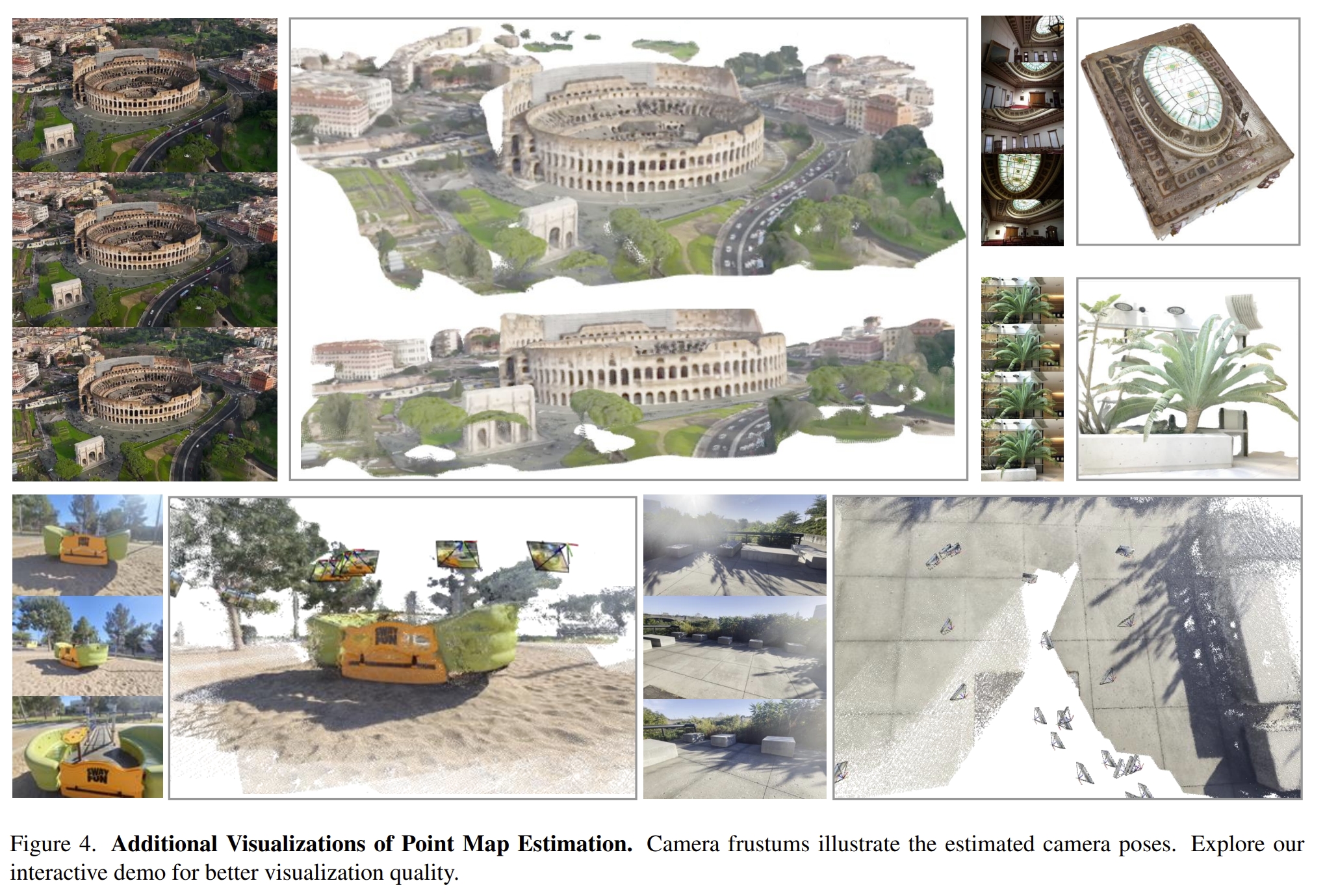
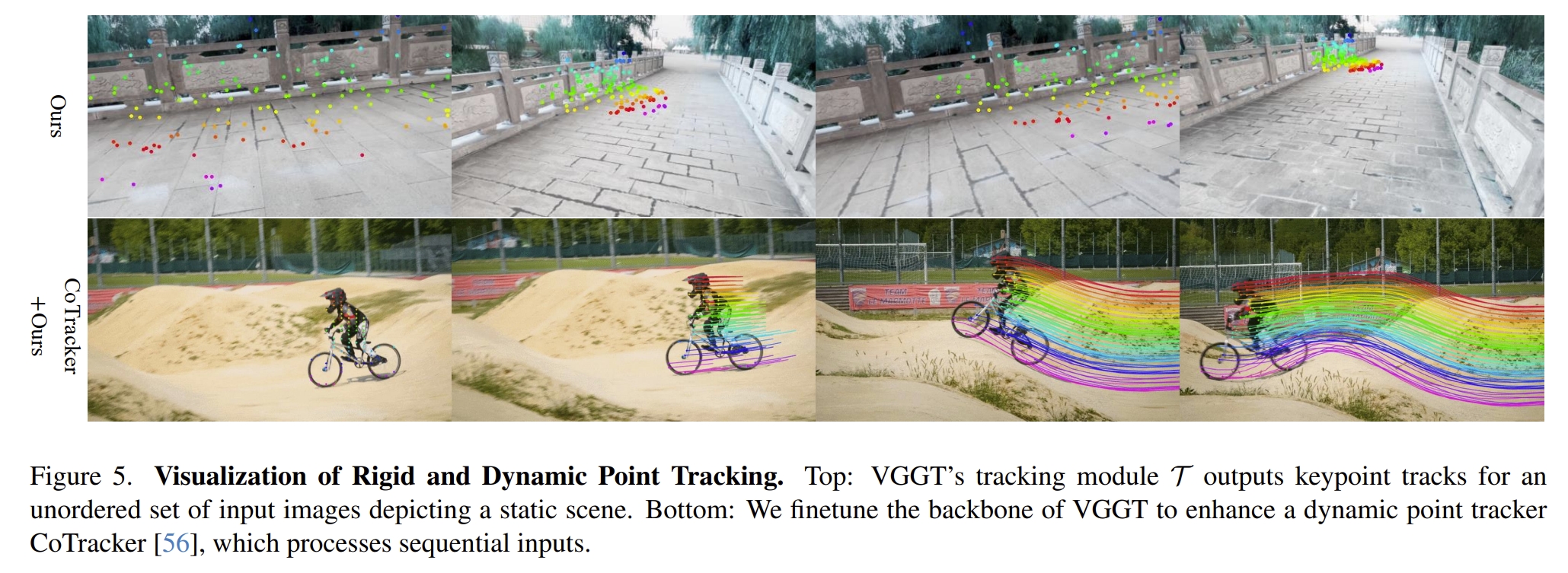
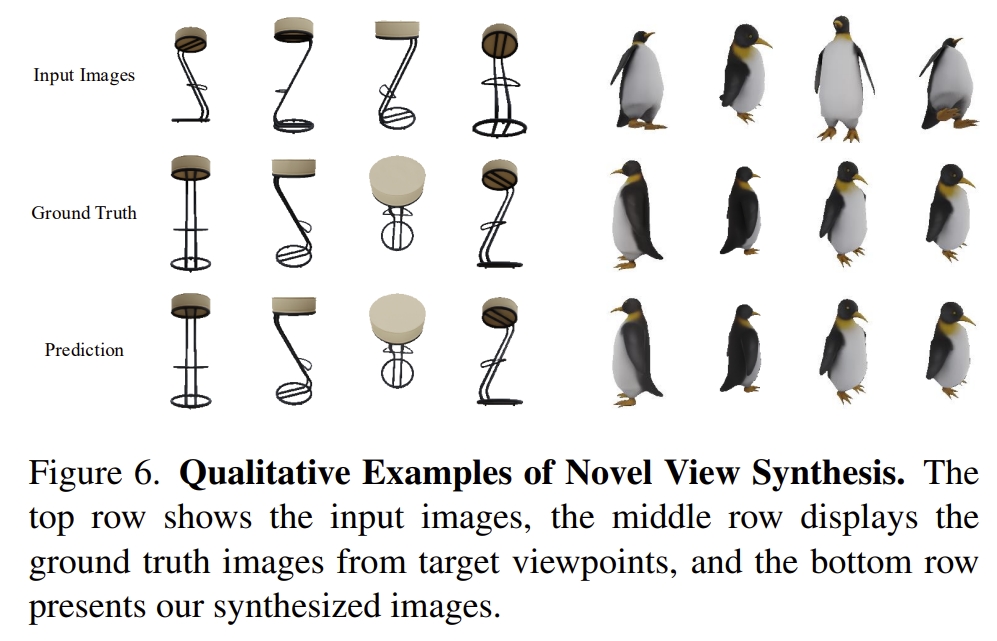
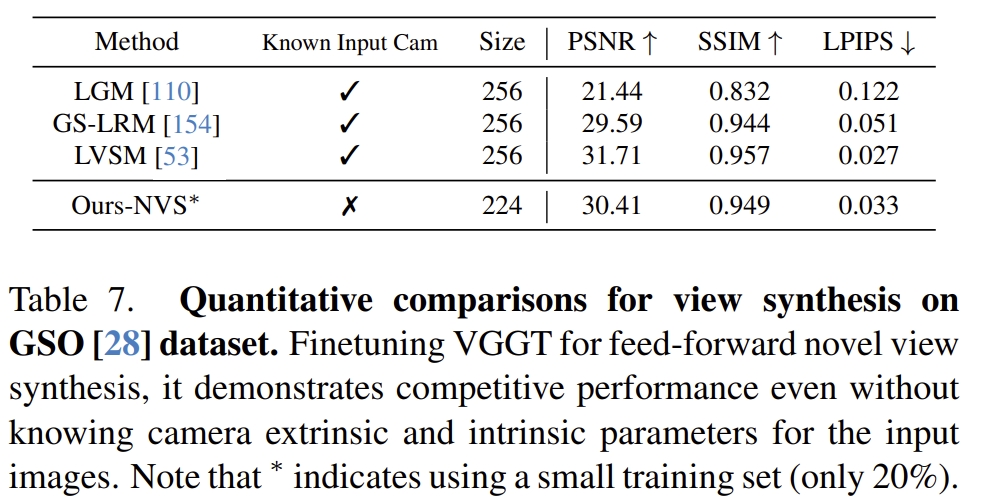
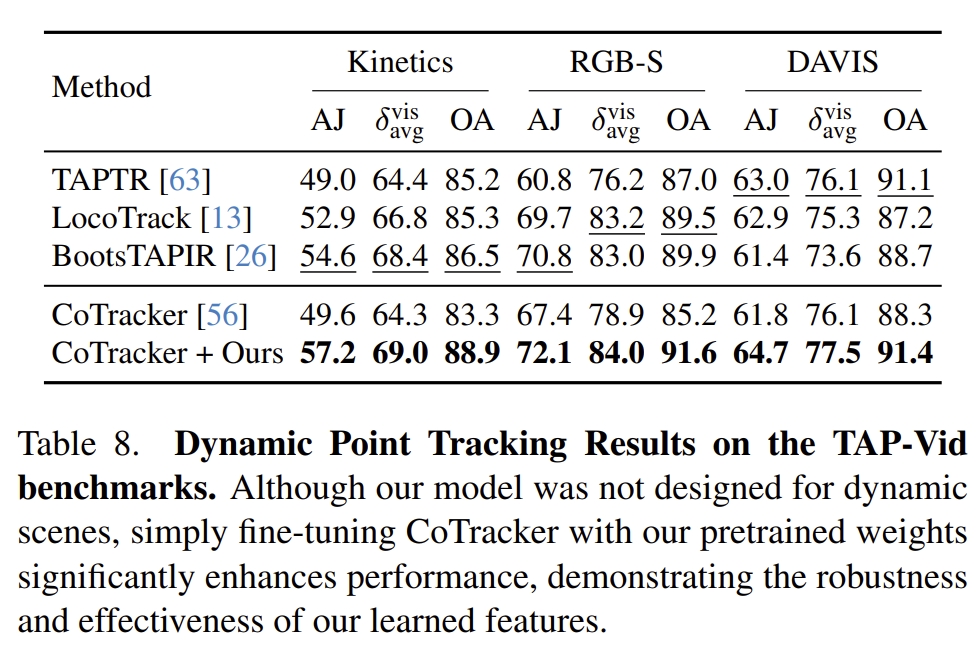
- point tracking以及新事件合成等任务
|
|
实验测试
- 本测试采用的代码及后续的注释(如有)均在Github
配置测试
git clone https://github.com/KwanWaiPang/vggt.git
cd vggt
# 创建虚拟环境
conda create -n VGGT python=3.11
conda activate VGGT
# conda remove --name VGGT --all
pip install -r requirements.txt
- 安装可视化工具
pip install -r requirements_demo.txt
-
下载模型link
-
运行demo
conda activate VGGT
pip install matplotlib
python demo_gradio.py
运行后似乎会自动下载前面下载好的模型,因此手动下载过就注释掉就可以了吧(但测试的时候发现会报错,那还是直接重新下载算了~)

最终有权限类的错误

尝试采用下面的visualization
python demo_viser.py --image_folder path/to/your/images/folder
conda activate VGGT
python demo_viser.py --image_folder dataset/tandt_train
在vscode中运行应该就可以直接点击打开进去浏览器观看效果了~
看上去大场景的效果似乎比Fast3R要好不少~



- 也可以采用在线的demo Link 早说嘛,我就懒得配置了😂而且在线的UI也好不少~
-
不过在线UI似乎是限制次数的,超次数要收费,所以测试多的还是要用自己的服务器~
- 在原readme中也从代码角度介绍了每个模块大致怎么使用
测试效果
- 首先先看看作者给的数据的效果
接下来看看测试非作者提供的数据集的效果~
- 单张图片
- 两个相近的视角
- 两个相差较大的视角
- 17张图片同时输入
整体效果感觉比Fast3R还是要好一些的~