引言
很久之前做过基于深度学习的分类网络和基于深度学习的目标检测算法 本博文对目标跟踪算法进行调研及部分工作解读。
与目标检测不同,跟踪需跨帧关联目标ID,面临遮挡、尺度变化、外观漂移等挑战。主流方案采用 Tracking-by-Detection 策略(先检测目标,再关联轨迹),但机器人场景(如人员跟随)需额外解决实时性、动态环境适应性与运动规划问题。
关键区分:视频目标跟踪(VOT)关注单视频序列的轨迹生成;机器人人员跟随(Person Following)是VOT在机器人控制闭环中的应用,需集成运动控制、多传感器融合及场景理解。
经典工作解读
| 年份 | 单位 | 模型 | 网站 | 说明 |
|---|---|---|---|---|
| 2025 | 南京大学 | MOTIP |  |
基于transformer的端到端多目标跟踪;基于Transformer的全局交互建模,无需后处理(如匈牙利匹配)。核心创新:【跨帧关联】通过自注意力机制建模目标间长期依赖; |
| 2025 | KTH Royal Institute of Technology | HiM2SAM |  |
基于sam2(视频目标分割)和CoTracker(视频点追踪),无需任何任务微调。基于transformer结构。1.分层运动估计:粗粒度(卡尔曼滤波)+ 精细粒度(CoTracker点追踪);2.长/短时记忆库:短时记忆(高置信度帧)防噪声干扰,长时记忆(非目标物体)避免轨迹漂移。 |
| 2020 | MMLab | MMTracking: OpenMMLab | 工业级MOT工具箱:基于PyTorch的统一框架,支持SiamRPN++、DeepSORT等10+算法 | |
| 2019 | 商汤 | SiamRPN++ |  |
引入更深的网络实现孪生网络目标跟踪算法:将骨干网络从ResNet-50扩展到ResNet-152 |
| 2018 | University of Chinese Academy of Science | DaSiamRPN | |
对检测数据集进行数据增广,使得其也可以用于训练跟踪模型;构造有语意的负样本对来增强跟踪器的判别能力,让网络学习判别能力,去寻找搜索区域中和模版更相似的物体;提高重跟踪上丢失目标的能力 |
| 2018 | 商汤 | SiamRPN | |
将检测引入跟踪;孪生+区域推荐:结合了跟踪中的孪生网络和检测中的区域推荐网络:孪生网络实现对跟踪目标的适应,让算法可以利用被跟踪目标的信息,完成检测器的初始化;区域推荐网络可以让算法可以对目标位置进行更精准的预测 |
| 2017 | University of Koblenz-Landau | Deep SORT |  |
结合卡尔曼滤波(运动预测)+ 匈牙利匹配(轨迹关联),通过Re-ID特征提升遮挡恢复能力;先通过检测器得到bounding box(生成detections),然后使用卡尔曼滤波预测,再使用匈牙利算法将预测后的tracks和当前帧中的detecions进行匹配(级联匹配和IOU匹配),而匹配的结果则是可以进行卡尔曼滤波更新 |
| 2017 | CMU | BACF | website | 解决了相关滤波类跟踪算法中的边界效应问题。 |
机器人目标/人员跟随算法
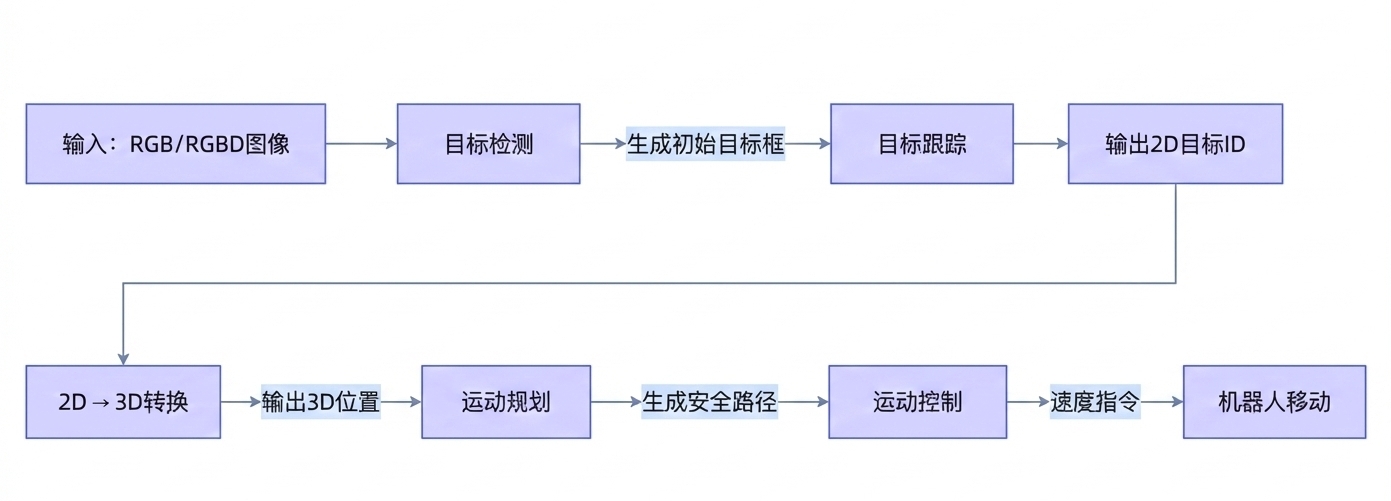
- 核心误区澄清: 目标跟踪算法(如DeepSORT)仅解决“2D目标ID关联”问题,不等于机器人可以实现人员跟随。 机器人跟随是多模块协同系统,需依次完成:检测 → 跟踪 → 3D定位 → 运动规划 → 机器人控制。 以下将逐层拆解每个模块的必要性与技术挑战。
- 目标检测(人员跟随的起点):人员跟随的第一步必须是目标检测。跟踪算法(如DeepSORT)本身无法生成初始目标框——它只能处理已知目标的ID关联。机器人启动时,必须先通过目标检测模型(如YOLOv8)在单帧图像中定位出“人”的位置,才能为后续跟踪提供起点。若跳过检测环节,机器人将完全“找不到人”。例如,当一个人从角落走出时,检测器需先框出目标,跟踪器才能开始关联ID。没有检测,跟踪就是无源之水。
- 跟踪(解决ID连续性问题):检测器每帧独立运行,易因遮挡、姿态变化导致目标ID跳变(如检测框在遮挡后突然移到新位置)。目标跟踪的核心价值正是解决这一问题:通过跨帧关联维持同一目标的ID连续性。例如,当人被家具短暂遮挡时,跟踪算法能利用卡尔曼滤波预测目标位置,避免ID丢失,使机器人保持平滑跟随。但需明确:跟踪算法仅输出2D目标框(图像坐标),不提供距离信息,这是后续环节的关键门槛。
- 2D→3D转换:机器人需要3D空间坐标 $(x, y, z)$ 才能规划路径,但跟踪算法仅输出2D坐标 $(x, y, w, h)$ 。必须通过深度信息将2D框转换为3D点。若使用RGBD相机(如Intel RealSense),深度图可直接获取目标中心点的Z坐标。若仅用纯单目RGB,则需额外部署深度估计模型。深度估计的错误会导致机器人误判距离,引发碰撞风险。
- 运动规划(从坐标到安全路径):获得3D位置后,需通过运动规划模块生成安全路径。机器人不能简单“朝目标移动”——必须考虑动态障碍物(如突然走过的路人)、安全距离(通常保持0.5~1.5米)及路径平滑性。比如ROS1和ROS2的Navigation Stack(基于A*/DWA算法)是标配:它接收3D目标位置,结合实时点云地图,生成避障路径,并输出安全速度指令。若缺失此环节,机器人可能直冲障碍物,或因路径突变导致急停急转。
- 运动控制(闭环执行):最后,运动控制模块将规划路径转化为机器人动作指令(线速度linear_x、角速度angular_z)。通过PID控制器+轨迹平滑(如卡尔曼滤波),确保机器人移动平稳。例如,当目标突然向左移动时,控制模块会平滑调整转向角,而非瞬间急转。若无此环节,机器人将频繁抖动,体验极差。