- 本博文复现过程采用的代码及代码注释(如有):My github repository
- 原github:Link
原理解读
1. 问题与动机
经典 LIO 普遍隐含静态环境假设:把环境当作不变背景做配准;当行人、车辆等运动物体出现在视场内时,ICP 等配准算法容易把动态元素误当作固定参考点,从而在位姿估计与建图上引入显著误差。这一问题在两类情形会尤其严重:一是环境中动态物体占主导,二是环境中静态几何特征有限,难以提供足够稳定的背景约束。 常见做法是「先分割/剔除动态,再做里程计」,但这会陷入一种鸡生蛋式的循环依赖:要准确定位需要可靠的静态点,而要可靠地区分动静态又往往依赖已经准确的位姿。
本文的核心思路是:不把动态检测当作配准前的独立预处理,而是把时空法向(spatio-temporal normal)分析嵌进 ICP 的迭代闭环里,使每一轮迭代同时更新「哪些点可信」与「位姿是多少」,从而在实时条件下弱化上述循环依赖。
所以本质上本文不能算是动态物体检测,应该是不可靠的点的滤除。
所谓的unstable points包含了动态以及不可靠的观测点。
- 动态点:相对背景有相对运动 → 局部时空拟合里时间维明显有差异
- 不可靠点:新视野、时间邻域不均匀、扫描模式变化等
2. 时空表示与法向的物理含义
将世界系下的点记为 $\mathbf{p}_i^j$,采集时刻为 $t^j$,构造四维时空点 $\tilde{\mathbf{p}}_i^j = (\mathbf{p}_i^j, t^j)$。设想时空中存在隐式曲面 $g(x,y,z,t)=0$,其梯度 $\nabla g = (a,b,c,d)^\top$ 即为该点处的时空法向 $\tilde{\mathbf{n}}=(a,b,c,d)$:$(a,b,c)$ 对应空间方向,$d$ 对应时间维分量。
对沿该曲面运动的点,对 $g=0$ 求全导数可得约束 $a v_x + b v_y + c v_z + d = 0$,即
$ d = -(a v_x + b v_y + c v_z). $
| 直观理解:$d$ 编码了「空间梯度与瞬时速度」之间的耦合;对理想静态背景,局部邻域在时空上对齐后 $d$ 应接近 0;对相对背景有明显相对运动的点,局部拟合出的超平面会在时间维上「翘起」,从而 $$ | d | $$ 变大。文中图 2 用 2D+时间示意:瞬时速度(切向)与时空法向(法向)的几何关系。 |
3. 时空法向如何估计
对每个点 $\mathbf{p}_i^j$,在其邻域 $\mathcal{N}_i^j$ 内收集来自滑动时间窗内多帧的邻居点,每个邻居带上各自时间戳,组成向量 $[\mathbf{p}_u^v;\, t_u^v]$。以邻域质心 $\mathbf{m}_i^j$ 为中心构造 $4\times 4$ 协方差矩阵(论文式 (2)),其最小特征值对应的特征向量即作为该点的时空法向 $\tilde{\mathbf{n}}$ 的估计——等价于在局部用 PCA 拟合一张时空切超平面,法向取最薄(方差最小)的方向。
需要注意:在线场景下邻域在时间上未必均匀,新观测区域或扫描模式突变也会在拟合中产生非零的「表观运动」,从而把部分静态点误判为动态。作者因此不把「不稳定点」仅等同于语义上的动态物体,而是把真动态点与配准上不可靠的点一并称为 unstable points(后文建图阶段会专门处理假阳性)。
we categorize both truly dynamic and unreliable points as “unstable points
4. 动态感知配准:嵌入 ICP 的动静态判别
整体仍采用 IEKF 框架估计 IMU-LiDAR 状态 $\mathbf{x}^j$(位姿、速度、偏置等),与 FAST-LIO2 类似先做 IMU 预积分与点云去畸变,并体素下采样。关键在 LiDAR 更新:动态感知 ICP 在算法 1 的循环中反复执行:
- 用当前位姿估计将当前帧变换到世界系;
- 基于时间滑动窗地图 $M_t$ 计算各点时空法向 $\tilde{\mathbf{n}}$;
-
用 $ d $ 与阈值 $d_{\mathrm{thr}}$ 划分 stable / unstable,只用 stable 点与全局地图配准; - 最小化 IMU 残差 + 点到平面残差更新状态,直至收敛;
- 用最终位姿更新 $M_t$ 与长期体素地图 $M_v$。
也就是说:动静态标签不是一次算死,而是随 ICP 迭代与位姿修正反复重算,实现「检测—配准」在同一优化过程里耦合。
双地图结构 $M_t$ 与 $M_v$
- 时间滑动窗地图 $M_t$:保留约 2 秒内的近期点云(iKdTree + 双端队列),时间上足够密,便于对每个点做时空邻域与法向估计。
- 长期体素地图 $M_v$:采用 VoxelMap 式平面体素表示,提供空间上更丰富的全局参考,用于稳定位姿。
二者分工兼顾:时间邻近支撑时空法向;空间覆盖支撑全局一致配准。
阈值 $d_{\mathrm{thr}}$ 的可解释选取
| 作者不用纯调参口吻,而是用时空法向与其空间投影 $(a,b,c,0)$ 的夹角 $\theta$ 刻画「时间维偏离」程度,并有 $\cos\theta$ 与 $d$、$\lVert \tilde{\mathbf{n}} \rVert$ 的闭式关系。文中举例:$\theta_{\mathrm{thr}}=5.7^\circ$ 时对应 $ | d | \approx 0.1$,便于把阈值与「可感知的微小运动」联系起来(开源 README 中也提到 $ | d | >0.1$ 作为不稳定判据量级)。 |
5. 静态建图:基于空间一致性的假阳性剔除
| 仅用 $ | d | $ 判动态会引入两类假阳性(论文图 4(a)):新暴露区域首次进入地图;相邻帧间扫描模式变化导致局部几何不一致。它们并非真实运动,却可能呈现非零 $d$。 |
空间一致性检验利用一条经验规律:真动态点往往成簇;孤立噪声点更像误检。流程概要:
- 对体素下采样后的 unstable 点做上采样/近邻扩展,找回邻域内可能同属一类的点;
- DBSCAN 聚类,去除孤立小噪点;
- 对每个簇求包围盒,过大的簇丢弃;
- 维护轻量短期静态滑动体素图 $M_{\mathrm{scc}}$,记录传感器附近近期判为静态的区域;
- 计算候选动态簇与 $M_{\mathrm{scc}}$ 的体积重叠:真实运动物体与已建静态结构重叠小;新观测静态区域与已有静态记录重叠大,从而被纠正。
该步骤主要服务静态地图更干净,与前面「定位用 stable 点」形成互补。
6. 小结:与相关路线的差异
| 方面 | 常见动态 LIO | 本文 BTSA |
|---|---|---|
| 动态处理与配准 | 多为先检测再配准,或依赖较强先验/学习类别 | 在 ICP 迭代内用时空法向联合筛点与估姿 |
| 时空法向相关先行工作 | 多用于位姿已知后的建图后处理,或依赖未来帧 | 当前帧、当前迭代内与状态估计耦合 |
| 地图 | 单一种全局表示 | 短时窗 $M_t$(法向)+ 长期 $M_v$(配准) |
若只记一句话:把点在 $(x,y,z,t)$ 里的局部几何与运动线索压进一个四维法向里,并让它参与每次 ICP 的数据关联,从而在动态占优或静态几何结构有限时仍尽量用「真静态」约束去拉住位姿;建图端再用空间一致性收拾假阳性。
复现及实验记录
安装过程
# 安装livox
cd ~/catkin_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ..
catkin build livox_ros_driver
# 安装btsa
cd ~/catkin_ws/src
git clone git@github.com:R-C-Group/btsa_test.git
cd ..
# catkin clean btsa
catkin build btsa
source devel/setup.bash
# 其他依赖安装
sudo apt-get install libgoogle-glog-dev
# 但系统自动安装的可能有问题,修复了“CMakeLists.txt”
- 运行:
source devel/setup.bash
roslaunch btsa dynamic.launch
# 速腾激光雷达
roslaunch btsa robosense.launch
实验结果
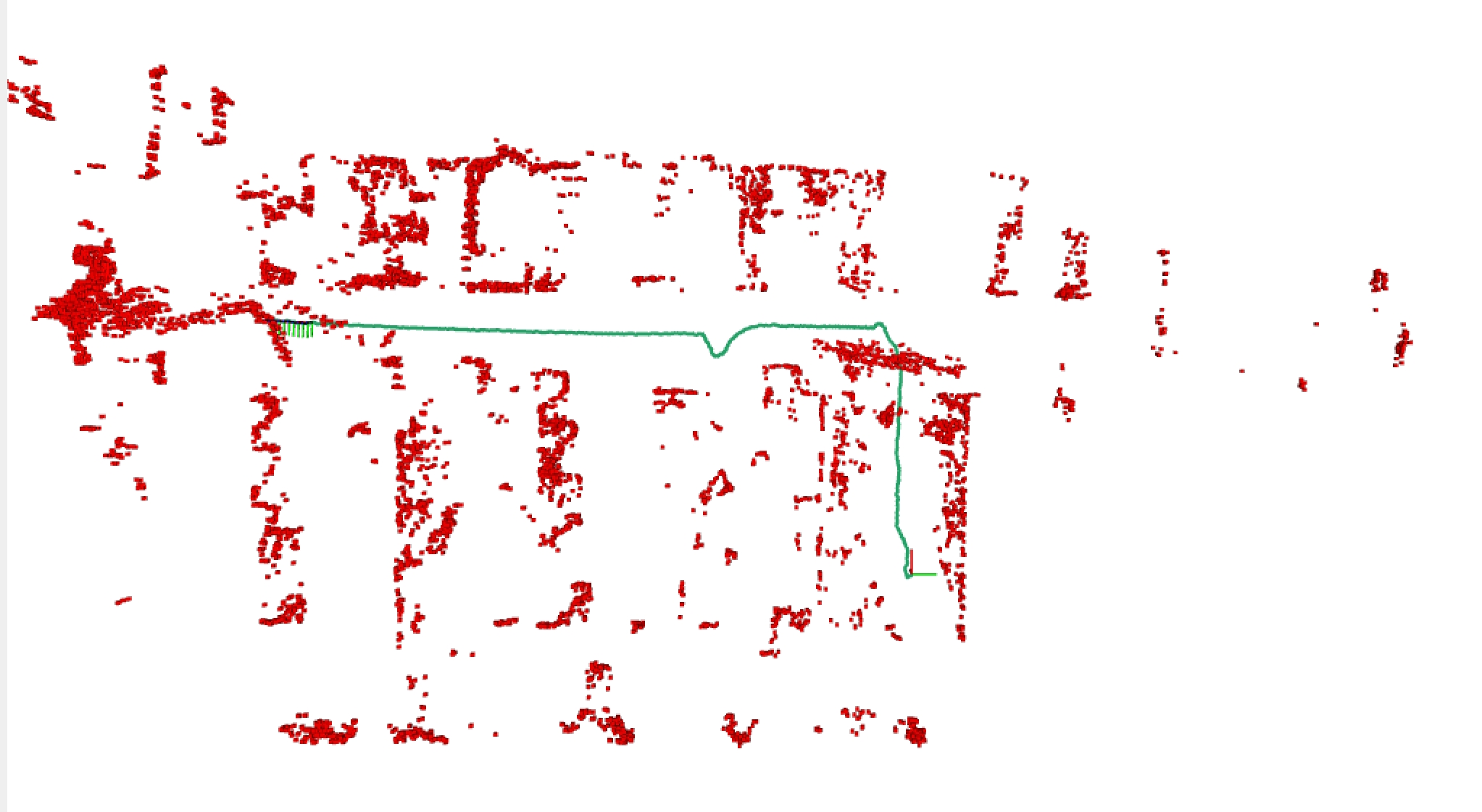
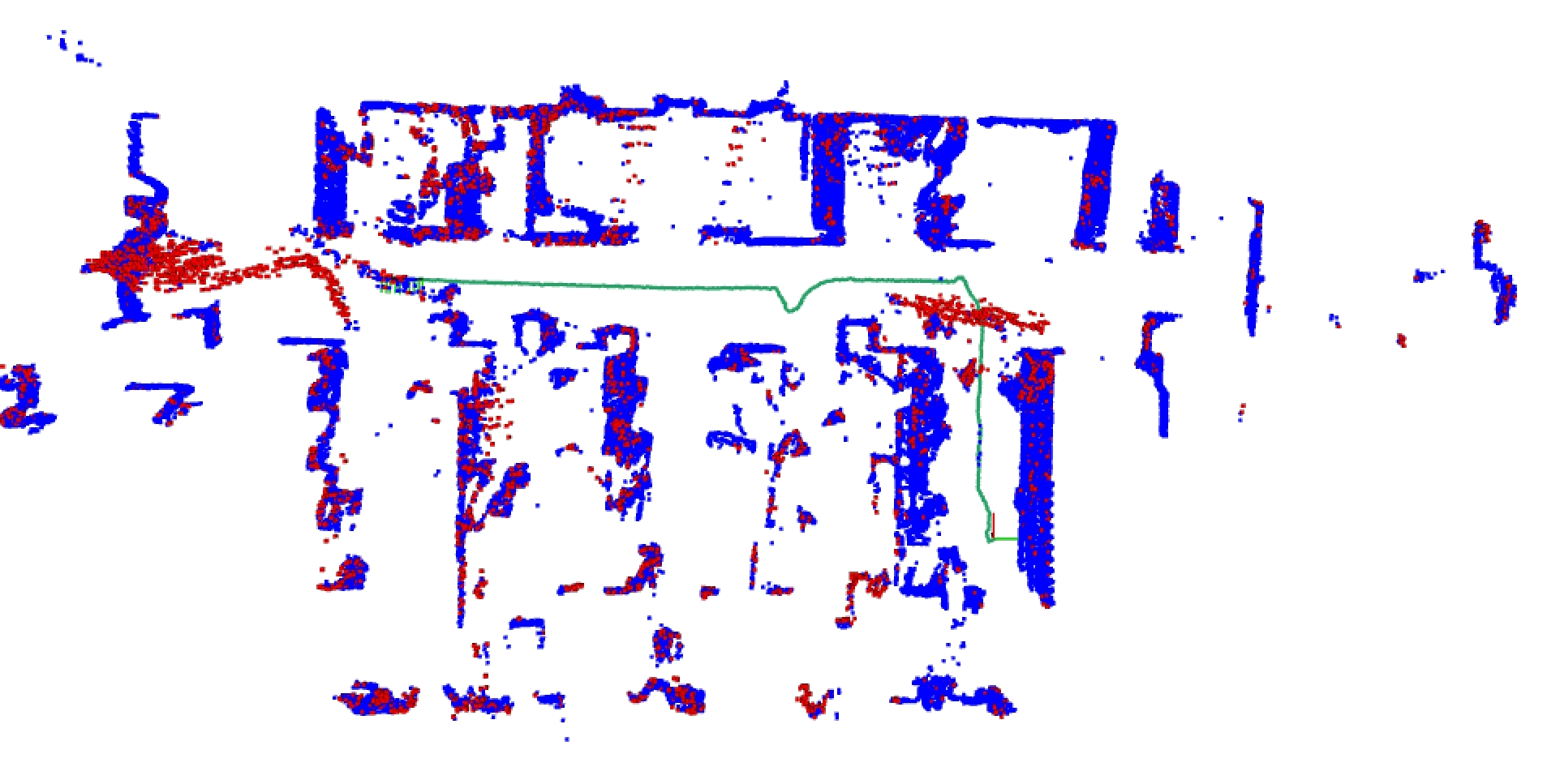
- 一开始跑作者给的rosbag出现没有Log文件的报错,但我提交的代码已经修复了,红色点为不稳定点云(动态点),蓝色点云为静态点。
- 基于速腾激光雷达(添加了速腾激光雷达的点云处理),测试效果如下:
 静态地图点
静态地图点
|
 动态地图点
动态地图点
|
/cloud_unstable:理解成「被判为动态/不稳定」的点云,所谓的动态点云应该说是打分超过阈值的点/cloud_static:当前帧里、去掉动态邻域扩张后的静态那一半扫描