引言
对于ROS2的代价地图层(Costmap Layers)有如下插件:
- 体素图层 Voxel Layer:利用深度传感器的数据和激光传感器射线投影数据来擦除空间中障碍信息以维护持久体素层。
- 测距图层 Range Layer:使用概率模型将传感器的测距数据生成在costmap上
- 静态图层 Static Layer:获取静态
map并将其中的栅格占据信息加载到costmap中 - 膨胀图层 Inflation Layer:用指数衰减算法对代价地图(costmap)中的致命障碍物进行膨胀。
- 障碍物图层 Obstacle Layer:通过从2D的雷达扫描数据在持久层2D costmap更新自由空间。
- 时空体素层 Spatio-Temporal Voxel Layer:通过传感器衰减模型维护当前的3D稀疏体素网格。
- 非持久体素层 Non-Persistent Voxel Layer:该插件通过测量数据最多的数据维护3D占据栅格地图。
- 禁区过滤器 Keepout Filter:维持运行时的导航禁区/导航安全区和首选车道
- 速度过滤器 Speed Filter:限制机器人在限速区域的最大速度
本博文基于ROS的代价地图插件,将其移植到ROS1中。
Nav2 Costmap 插件移植到 ROS1
将三个 nav2 costmap 插件(DenoiseLayer、RangeSensorLayer、KeepoutFilter)移植到已有的 ROS1 costmap_2d 功能包,保持与 ROS1 框架完全兼容。
核心 API 转换原则
| nav2(ROS2) | ROS1 等价写法 |
|---|---|
node->declare_or_get_parameter(name, default) |
nh.param(key, var, default) |
RCLCPP_INFO(logger_, ...) |
ROS_INFO(...) |
node->create_subscription<T>(topic, cb, qos) |
nh.subscribe(topic, queue, cb, this) |
clock_->now() |
ros::Time::now() |
rclcpp::Time last_reading_time_ |
ros::Time last_reading_time_ |
tf2::Duration transform_tolerance_ |
ros::Duration transform_tolerance_ |
nav2_costmap_2d:: 命名空间 |
costmap_2d:: 命名空间 |
DenoiseLayer(去噪层)
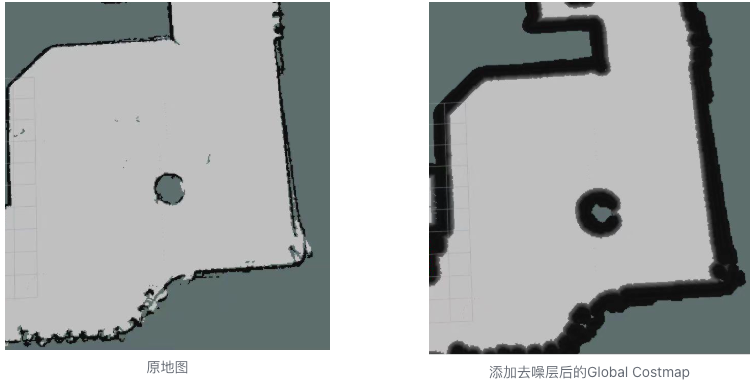
功能:过滤掉 Costmap 中因传感器噪声产生的孤立障碍点或小型障碍组。可有效防止膨胀层对噪声点进行不必要的膨胀。此部分与ROS版本无关,因此移植较为简单。最终去噪的效果如下图所示:
算法核心(纯 C++,与 ROS 无关):移植 denoise/image.hpp 和 denoise/image_processing.hpp 时几乎不需要修改,只替换命名空间即可。
- [修改]
/navigation_custom/costmap_2d/CMakeLists.txt- 添加
denoise_layer.cpp到插件目标
- 添加
- [修改]
navigation_custom/costmap_2d/costmap_plugins.xml- 注册
costmap_2d::DenoiseLayer
- 注册
- [新增]
include/costmap_2d/denoise/image.hpp- 直接复制 nav2 版本,将
nav2_costmap_2d命名空间改为costmap_2d
- 直接复制 nav2 版本,将
- [新增]
include/costmap_2d/denoise/image_processing.hpp- 直接复制 nav2 版本,将命名空间改为
costmap_2d
- 直接复制 nav2 版本,将命名空间改为
- [新增]
include/costmap_2d/denoise_layer.h- 继承自
costmap_2d::Layer(ROS1 版本) - 替换所有 nav2 类型引用
- 继承自
- [新增]
plugins/denoise_layer.cpponInitialize():nh.param()替换参数读取updateCosts(): 核心算法逻辑不变
接下来测试添加denoise_layer的效果。在 local_costmap 的 plugins 列表中,在 obstacle_layer 和 inflation_layer 之间插入 denoise_layer:
local_costmap:
plugins:
- { name: static_layer, type: "costmap_2d::StaticLayer" }
- { name: obstacle_layer, type: "costmap_2d::ObstacleLayer" }
+ - { name: denoise_layer, type: "costmap_2d::DenoiseLayer" }
- { name: inflation_layer, type: "costmap_2d::InflationLayer" }
并添加 denoise_layer 的参数块:
denoise_layer:
enabled: true
minimal_group_size: 2 # 小于 2 个相邻格子的障碍物组会被清除
group_connectivity_type: 8 # 8 连通(含对角线)
[!NOTE] 先只修改 local_costmap(局部代价地图),因为它更新频率更高(4Hz),障碍物变化更直观,便于观察去噪效果。验证通过后再考虑添加到 global_costmap。 将
minimal_group_size改为4或6,观察更多小型障碍物组是否被过滤。
去噪原理
将 costmap 视为二值图像(前景 = 障碍物/未知,背景 = 空闲空间),通过连通分量分析找出所有前景像素的连通组,删除小于阈值的组。
前景判定(isBackground)
以下值被视为前景(噪声候选):
| Costmap值 | 名称 | 条件 |
|---|---|---|
| 254 | LETHAL_OBSTACLE |
始终视为前景 |
| 253 | INSCRIBED_INFLATED_OBSTACLE |
始终视为前景 |
| 255 | NO_INFORMATION |
仅当 denoise_unknown: true 时视为前景 |
其余值(0=FREE_SPACE 和 1-252 的中间值)视为背景,不参与去噪。
两种算法:
根据 minimal_group_size 自动选择:
算法一:快速单像素过滤(minimal_group_size == 2)
基于形态学膨胀,速度比算法二快约 10 倍,但只能清除完全孤立的单像素。
- 对每个像素计算 8 邻域(不含自身)的最大值
- 若像素本身是前景,但邻域最大值是背景 → 该像素孤立 → 清除为
FREE_SPACE
去噪前: 去噪后:
· · · · · · · · · ·
· · X · · (孤立) · · · · · ← 已清除
· · · · · · · · · ·
· X X · · (成对) · X X · · ← 保留
· · · · · · · · · ·
算法二:连通分量分析(minimal_group_size >= 3)
使用 SAUF(Scan Array Union Find)算法进行完整的连通分量标记:
- 遍历所有像素,为每个前景连通组分配唯一标签
- 统计每组大小(直方图)
- 组大小 <
minimal_group_size的 → 清除为FREE_SPACE
去噪前 (minimal_group_size=5): 去噪后:
· X · · · · · · · · · · ← 组A(1像素) 已清除
· · · X X · · · · · · · ← 组B(3像素) 已清除
· · · · X · · · · · · ·
· X X X X X · X X X X X ← 组C(8像素) 保留
· X X · X · · X X · X ·
- 参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
enabled |
bool | true |
是否启用该层 |
minimal_group_size |
int | 2 |
最小保留组大小。小于此值的前景连通组被清除。=2 只清除孤立单像素(快速),≥3 使用连通分量算法清除小簇 |
group_connectivity_type |
int | 8 |
连通类型。4=十字邻域(上下左右),8=8邻域(含对角线),注意,只有两个选择 |
denoise_unknown |
bool | false |
[改进了原版ROS2] 是否将 NO_INFORMATION(255) 也视为前景参与去噪。开启后还会自动扩展处理范围到整个 costmap |
group_connectivity_type图示
4连通(Way4) 8连通(Way8)
· ↑ · ↗ ↑ ↖
← ■ → ← ■ →
· ↓ · ↙ ↓ ↘
8连通下对角线像素也算同一组,组会更大,被清除的可能性更低。
配置示例:
- 全局 costmap(清除静态地图噪声 + 未知像素噪声)
global_costmap:
plugins:
- { name: static_layer, type: "costmap_2d::StaticLayer" }
- { name: obstacle_layer, type: "costmap_2d::ObstacleLayer" }
- { name: denoise_layer, type: "costmap_2d::DenoiseLayer" } # 在 inflation 前
- { name: inflation_layer, type: "costmap_2d::InflationLayer" }
denoise_layer:
enabled: true
minimal_group_size: 5 # 清除 <5 像素的小簇
group_connectivity_type: 8
denoise_unknown: true # 也清除孤立未知像素
- 局部 costmap(仅清除传感器噪声)
local_costmap:
denoise_layer:
enabled: true
minimal_group_size: 2 # 仅清除单像素噪声(最快)
group_connectivity_type: 8
# denoise_unknown 默认 false,局部 costmap 通常不需要
- 相对 Nav2 原版的改进:
| 功能 | Nav2 原版 | ROS1 增强版 |
|---|---|---|
| 去噪 LETHAL/INSCRIBED 像素 | ✅ | ✅ |
| 去噪 NO_INFORMATION 像素 | ❌ 不支持 | ✅ denoise_unknown 参数 |
| 处理范围 | 依赖前层 bounds | denoise_unknown 开启时自动扩展到全图 |
| NO_INFORMATION 膨胀修复 | ❌ 255 为最大字节值导致膨胀失效 | ✅ 替换为 254 参与运算 |
RangeSensorLayer(距离传感器层)
功能:支持超声波、TOF等 sensor_msgs/Range 距离传感器,使用贝叶斯概率模型进行栅格占用估计。
- [修改]
navigation_custom/costmap_2d/CMakeLists.txt- 添加
range_sensor_layer.cpp,依赖angles和sensor_msgs
- 添加
- [新增]
include/costmap_2d/range_sensor_layer.h- 继承自
costmap_2d::CostmapLayer rclcpp::Time→ros::Timestd::vector<nav2::Subscription<...>>→std::vector<ros::Subscriber>tf2::Duration→ros::Duration
- 继承自
- [新增]
plugins/range_sensor_layer.cpponInitialize(): 使用ros::NodeHandle订阅各 Range topicupdateBounds()/updateCosts(): 传感器概率模型逻辑不变clock_->now()→ros::Time::now()
KeepoutFilter(禁区过滤器,简化版)
功能:接收一张 nav_msgs/OccupancyGrid 地图作为禁区掩膜(Mask),将掩膜中的高值区域标记为 Costmap 中的致命障碍(LETHAL_OBSTACLE)。
简化方案:不依赖 nav2 的 CostmapFilterInfo 双阶段订阅机制,直接订阅一个 OccupancyGrid topic。
- [新增]
include/costmap_2d/keepout_filter.h- 继承自
costmap_2d::CostmapLayer - 成员变量包括:mask topic 名称、mask 数据指针、lethal 阈值
- 继承自
- [新增]
plugins/keepout_filter.cpponInitialize(): 用nh.param()读取 mask_topic,并订阅之maskCallback(): 接收并存储最新掩膜updateBounds(): 有掩膜更新时标记更新区域updateCosts(): 将掩膜中值 ≥lethal_threshold的 Cell 设置为 LETHAL_OBSTACLE
接下来通过节点发布禁行区域(注意,当前模拟原点周围一个2*2方形区域为禁行区域):
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
keepout_mask_publisher.py
发布一张 nav_msgs/OccupancyGrid 作为 KeepoutFilter 的禁区掩膜。
在地图原点附近放置一个 2m x 2m 的矩形禁区(值=100)。
用法:
rosrun simulated_navigation keepout_mask_publisher.py
参数 (可通过 rosparam 设置):
~zone_x 禁区中心 X (m), 默认 0.0
~zone_y 禁区中心 Y (m), 默认 0.0
~zone_width 禁区宽度 (m), 默认 2.0
~zone_height 禁区高度 (m), 默认 2.0
~resolution 栅格分辨率 (m), 默认 0.05 (与主地图一致)
~frame_id 坐标系, 默认 "map"
"""
import rospy
from nav_msgs.msg import OccupancyGrid
from geometry_msgs.msg import Pose
def main():
rospy.init_node('keepout_mask_publisher', anonymous=False)
# 读取参数
zone_x = rospy.get_param('~zone_x', 0.0)
zone_y = rospy.get_param('~zone_y', 0.0)
zone_width = rospy.get_param('~zone_width', 2.0)
zone_height = rospy.get_param('~zone_height', 2.0)
resolution = rospy.get_param('~resolution', 0.05)
frame_id = rospy.get_param('~frame_id', 'map')
# 计算掩膜地图的大小和原点
# 掩膜只需覆盖禁区区域即可(加一点余量)
margin = 1.0 # 周围 1m 余量
origin_x = zone_x - zone_width / 2.0 - margin
origin_y = zone_y - zone_height / 2.0 - margin
map_width_m = zone_width + 2.0 * margin
map_height_m = zone_height + 2.0 * margin
width_cells = int(map_width_m / resolution)
height_cells = int(map_height_m / resolution)
# 构建 OccupancyGrid 消息
grid = OccupancyGrid()
grid.header.frame_id = frame_id
grid.info.resolution = resolution
grid.info.width = width_cells
grid.info.height = height_cells
grid.info.origin = Pose()
grid.info.origin.position.x = origin_x
grid.info.origin.position.y = origin_y
grid.info.origin.position.z = 0.0
grid.info.origin.orientation.w = 1.0
# 初始化为全 0 (自由空间)
data = [0] * (width_cells * height_cells)
# 在禁区区域填入 100 (占用)
zone_min_x = zone_x - zone_width / 2.0
zone_max_x = zone_x + zone_width / 2.0
zone_min_y = zone_y - zone_height / 2.0
zone_max_y = zone_y + zone_height / 2.0
for row in range(height_cells):
for col in range(width_cells):
world_x = origin_x + (col + 0.5) * resolution
world_y = origin_y + (row + 0.5) * resolution
if zone_min_x <= world_x <= zone_max_x and zone_min_y <= world_y <= zone_max_y:
data[row * width_cells + col] = 100
grid.data = data
# latched publisher: 发布后即使没有新消息,新订阅者也能收到最后一帧
pub = rospy.Publisher('/keepout_mask', OccupancyGrid, queue_size=1, latch=True)
rospy.sleep(0.5) # 等待 publisher 注册完成
grid.header.stamp = rospy.Time.now()
pub.publish(grid)
rospy.loginfo(
"KeepoutMaskPublisher: published keepout zone at (%.1f, %.1f), "
"size %.1fm x %.1fm, map %dx%d cells, topic=/keepout_mask",
zone_x, zone_y, zone_width, zone_height, width_cells, height_cells
)
# 保持节点运行 (latched message 需要节点存活)
rospy.spin()
if __name__ == '__main__':
main()