本博文对高翔开源的Lightning-LM(即Lightning-Speed Lidar Localization and Mapping) 进行测试与复现。
本博文仅供本人学习记录用~
- Github源码
- 本博文复现过程采用的代码及代码注释(如有):My github repository
- 基于ROS1的版本:link
安装配置
- 采用ubuntu22.01(ROS2 humble)
- 首先创建一个工作空间
mkdir -p colcon_ws/src
cd ~/colcon_ws/src
git clone https://github.com/gaoxiang12/lightning-lm.git
# 或者采用我的代码
git clone git@github.com:R-C-Group/Lightning-LM.git
- 安装依赖(包含:Pangolin)
bash ./scripts/install_dep.sh
sudo apt-get install libunwind-dev
sudo apt-get install libgoogle-glog-dev
# 解压Pangolin,然后进入到对应目录
cd /lightning-lm/thirdparty/Pangolin-0.9.3/
./scripts/install_prerequisites.sh
# Configure and build
sudo apt-get install python3-wheel #可能缺少
cmake -B build
cmake --build build
cd build
sudo make install #必须
# 5. 更新动态链接库缓存
sudo ldconfig
- 编译
colcon build
# 注意要安装colcon包
sudo apt install python3-colcon-common-extensions
#最后要记得source一下
# source ~/colcon_ws/install/local_setup.bash
echo "source ~/colcon_ws/install/local_setup.bash" >> ~/.bashrc
-
编译过程如果报错
c++: fatal error: Killed signal terminated program cc1plus compilation terminated.则是由于是由于系统内存不足导致的。 -
数据准备是需要将数据转换为ros2的db3格式的,不过作者提供了转换后的数据:BaiduYun: https://pan.baidu.com/s/1XmFitUtnkKa2d0YtWquQXw?pwd=xehn 提取码: xehn
debug
GDB debug
# 1. 安装GDB
sudo apt-get install gdb
# 2. 使用GDB运行程序
gdb --args /home/kwanwaipang/colcon_ws/src/install/lightning/lib/lightning/run_slam_online --config ./config/default_nclt.yaml
# 在gdb提示符下运行
(gdb) run
# 程序崩溃后,获取回溯信息
(gdb) bt
(gdb) bt full
# 查看所有线程的堆栈
(gdb) thread apply all bt
# 退出gdb
(gdb) quit
如果打开Pangolin后出现Segmentation fault,应该是WSL 的图形子系统与 OpenGL/Pangolin 不兼容。
- 安装必要的图形库:
# 更新系统
sudo apt update
sudo apt upgrade -y
# 安装 Mesa 和 OpenGL 相关库
sudo apt install -y \
mesa-utils \
libgl1-mesa-glx \
libgl1-mesa-dri \
libglu1-mesa \
libegl1-mesa \
libgles2-mesa \
libosmesa6
# 安装 X11 相关
sudo apt install -y \
x11-apps \
x11-utils \
x11-xserver-utils \
xauth \
xorg \
xvfb
# 测试 OpenGL
glxinfo | grep -E "OpenGL|renderer"
glxgears # 应该能看到旋转的齿轮
似乎都无效,最终采用强制使用X11后端而不是Wayland
# 禁用Wayland,强制使用X11
export WAYLAND_DISPLAY=""
export QT_QPA_PLATFORM="xcb"
export GDK_BACKEND="x11"
export SDL_VIDEODRIVER="x11"
export PANGOLIN_WINDOW_URI="x11://"
# 然后运行程序
ros2 run lightning run_slam_online --config ./config/default_nclt.yaml
实验测试
建图测试
- 实时建图(实时播包)
- 启动建图程序:
ros2 run lightning run_slam_online --config ./config/default_nclt.yaml - 播放数据包
ros2 bag play /home/kwanwaipang/NCLT/20130110 - 保存地图(保存地址为
data/new_map)ros2 service call /lightning/save_map lightning/srv/SaveMap "{map_id: new_map}"
- 启动建图程序:
- 离线建图(遍历跑数据,更快一些)
ros2 run lightning run_slam_offline --config ./config/default_nclt.yaml --input_bag 数据包- 结束后会自动保存至data/new_map目录下
- 查看地图
- 查看完整地图:
pcl_viewer ./data/new_map/global.pcd - 实际地图是分块存储的,global.pcd仅用于显示结果
- map.pgm存储了2D栅格地图信息
- 请注意,在定位程序运行过程中或退出时,也可能在同目录存储动态图层的结果,所以文件可能会有更多。
- 查看完整地图:

最后看看建图效果:


纯定位测试
- 实时定位
- 将地图路径写到yaml中的 system-map_path 下,默认是new_map(和建图默认一致)
- 将车放在建图起点处
- 启动定位程序:
ros2 run lightning run_loc_online --config ./config/default_nclt.yaml - 播包或者输入传感器数据即可
首先启动定位程序即可看到加载地图的情况


- 离线定位
ros2 run lightning run_loc_offline --config ./config/default_nclt.yaml --input_bag 数据包
- 接收定位结果
- 定位程序输出与IMU同频的TF话题(50-100Hz)

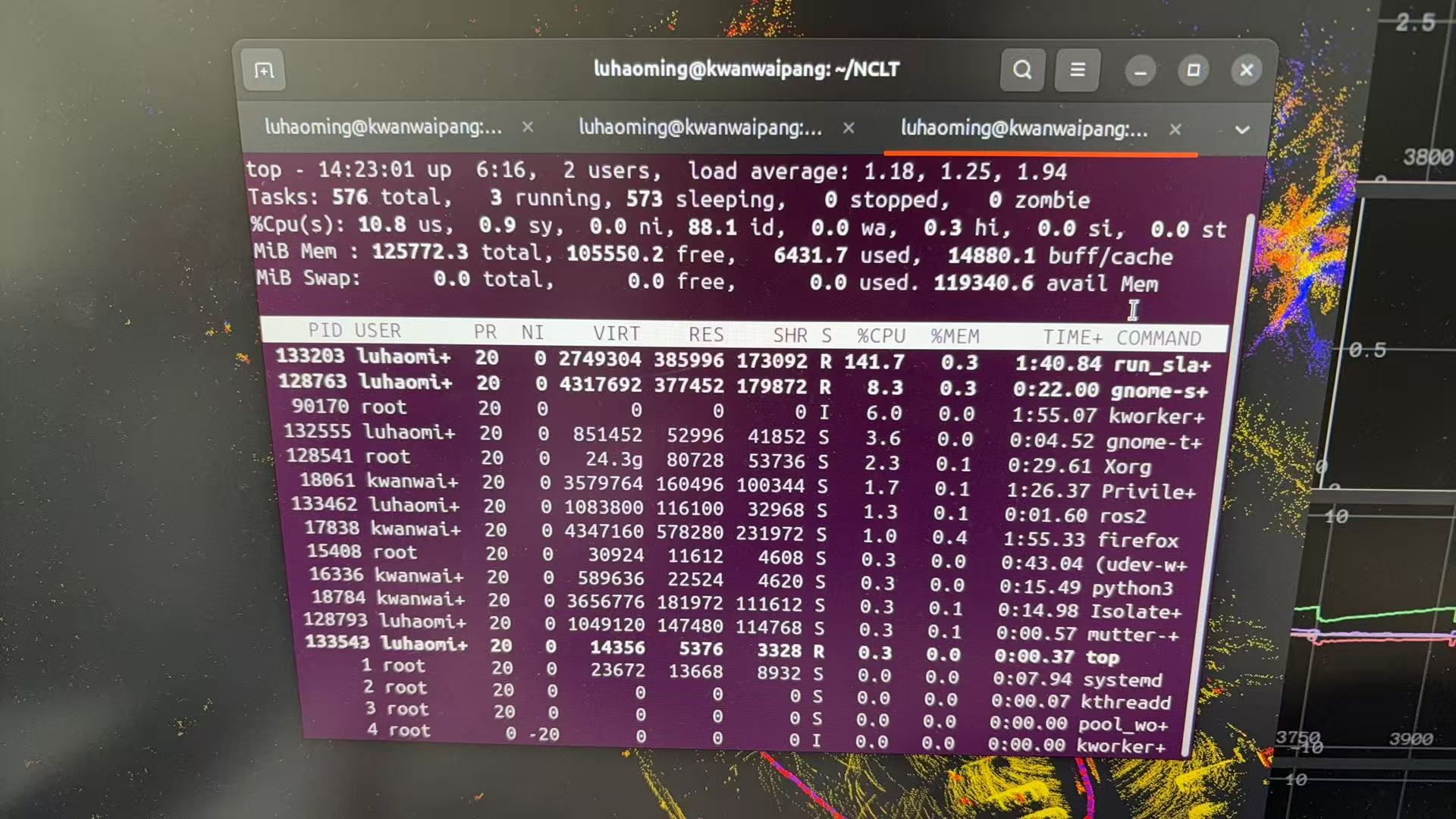
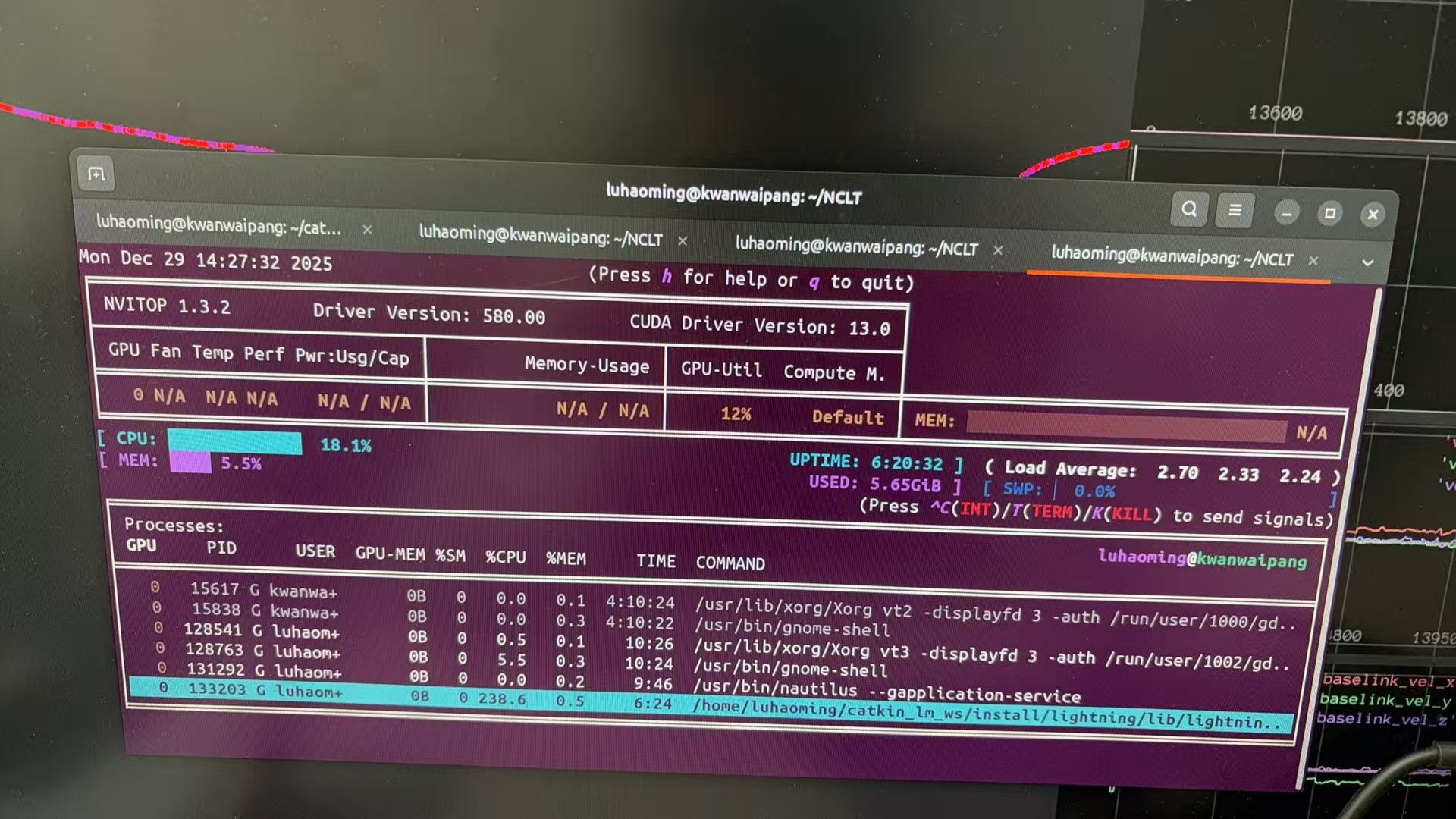
算力分析
Full SLAM情况下,查看CPU占用情况如下:

- 处理器是11th Gen Intel(R) Core(TM) i7-11800H @ 2.30GHz (2.30 GHz),机带RAM为32.0 GB(分到WSL中只有16GB)
- 【CPU占用分析】
- 程序使用了约1.2个物理核心(占用率为121.3%;100% = 1个CPU核心满负荷)【PS:对于i7-11800H(8核16线程)来说最大可达1600%】
- CPU使用情况:7.1% (其中run_slam_online占主要部分)
- 【内存占用分析】:
- RES(常驻内存):753,484 KB ≈ 736 MB【此处显示总内存15864.2 MiB(约16GB),占用约4.6%】
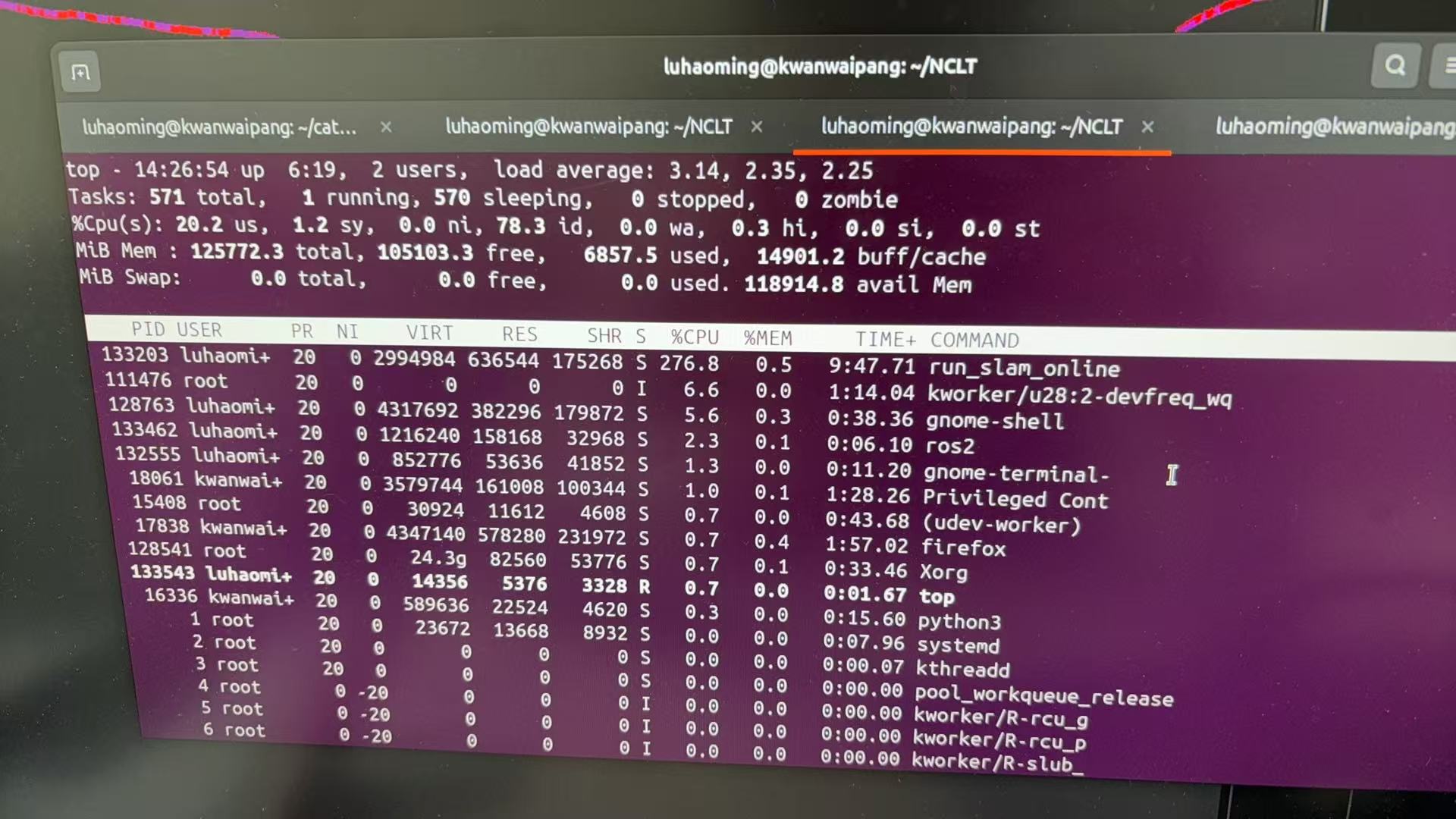
存定位模式情况下,查看CPU占用情况如下:

那么同步到之前调研的Thor上,两者架构差异如下:
| 指标 | 当前性能 11th Gen Intel(R) Core(TM) i7-11800H |
预测性能 Arm® Neoverse®-V3AE |
|---|---|---|
| 架构 | x86-64 (Intel) | ARMv9 (Neoverse) |
| 核心数 | 8核16线程 | 14核 |
| 主频 | 2.3GHz | 2.6GHz |
| 内存带宽 | ~50GB/s | 273 GB/s (预测) |
| SIMD指令集 | AVX2/AVX512 | SVE2 (可伸缩向量) |
| 内存 | 16G(32G) | 128G |
| Full SLAM CPU占用情况 | (121.3%)1.2个Intel核 | V3AE 的架构领先 约 3 代左右(应该相当于Intel Core i7-12700 / i5-13500 级别),主频提升了约 13%;预测单核占用率为75%~85% |
| Full SLAM 内存占用情况 | 736MB | 内存带宽更高。占用率可能会因为等待 I/O 的时间减少而进一步下降。 |
| 纯定位模式CPU占用情况 | 80%~90% | — |
| 纯定位模式内存占用情况 | 612MB | — |
在Thor上配置安装
而然,实测lightning-lm在Thor上运行的CPU占用率为2~2.8个物理核(一共14个,占总资源的不到30%),内存消耗约370+MB。
注意对于Thor由于采用的是ARM架构,编译可能存在某些依赖库的问题,注释掉即可(部分库ARM架构下没有)~